V
主页
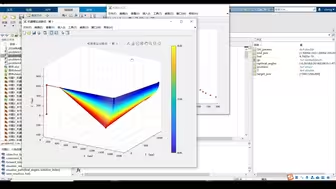
[CoppeliaLib] CoppeliaSim(原Vrep)控制PUMA560机械臂 无需建立DH矩阵即可进行逆运动学控制
发布人
采用CoppeliaSim(原Vrep)和Simulink进行联合仿真,实现PUMA560机械臂,这个例程主要是运动学和逆运动学的控制。使用CoppeliaLib库的最大优势是不需要建立DH矩阵,使用三个Simulink模块即可完成逆运动学控制。所用到的demo请联系淘宝客服。
打开封面
下载高清视频
观看高清视频
视频下载器
[Lib库 2]CoppeliaSim(原Vrep)机械臂抓取的Simulink实现 笛卡尔空间插值
[CoppeliaLib] CoppeliaSim(原Vrep)避障小车的Simulink实现
CoppeliaSim(原Vrep)基础入门
机械臂--开源!
Arduino控制的机械臂 - 保存/回放/导出/导入动作
双目视觉定位的六轴3D打印的机械臂(基础版本python控制)
【机器人】机械臂建模开发: 基于模型的设计方法总结 - MATLAB&Simulink
Matlab\Simulink代码及模型比较工具
四天三夜,极限压榨时间,终于搞定人机对弈了,大二的我们已经尽力了。
万元内 Aloha 机械臂方案正式发布
Aloha 机械臂标准模型控制器正式发布
PD控制二轴机械臂Simulink仿真全过程
机械臂Dummy + 丐版ROBOTIQ力控夹爪
【机器人】机械臂建模开发: 如何实现机械臂和夹持器的控制以及任务调度?-MATLAB&Simulink
IROS复现:基于DDPG的机械臂抓取训练(sim2real)
arduino控制的机械臂2.0
2024华数杯A题机械臂优化Matlab代码求解
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
Consensus Complementarity Control for Multi-Contact MPC
5分钟 带你轻松开发USB虚拟串口 手把手教你做USB-CAN(4)
机械臂控制系统开发-处方模块
机械臂创意手舞!星海图超轻型力控机械臂A1现已正式发售,3.98万起!
ROS2版DUMMY - Dummy ROS2支持的第一步 如何创建URDF文件
松灵Cobot Magic | 基于端到端e2e得算法再次进化,只需要一些少量的数据你就可以拥有一个具有很强空间泛化性能的Embodied AI
重磅!把机械臂价格打下来!手搓成本仅5K的六轴达妙机械臂!【DIY乐趣】
8月7日 (1)
【疯疯】一套完整的码垛线运行流程,机械臂真棒。
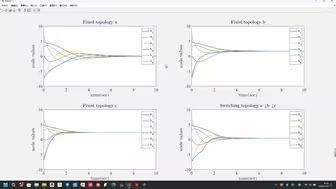
【206】多智能体系统 (Multi-Agent Systems, MASs) 编队, 切换拓扑
上位机软件连接关节电机时出现的异常总结
Simulink环境下的Matlab强化工具箱使用
【202】多智能体系统 (Multi-Agent Systems, MASs) 一致性的分布式线性二次离散博弈方法
机械臂手眼标定(眼在手外)–法奥FR3-ROS RVIZ
强化学习控制,端到端,PPO算法,神经网络控制,SImulink可编程,PX4小无人机飞控,硬件在环仿真到实物飞行
2024华数杯A题机器臂关节角路径优化MATLAB完整求解
零基础学AutoSAR:工具链
(搬)基于Ardunino的五自由度开源机械臂M3CKA【1】
开源三轴机械臂
机械臂最有用的一集
来自深圳的场地道具训练第一弹技术爆料!港科自定义控制器丝滑兑矿!
【逐飞科技】2024年 电赛E题 机械臂安装演示