V
主页
京东 11.11 红包
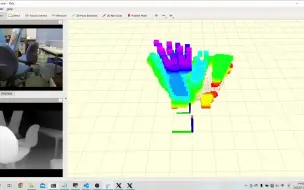
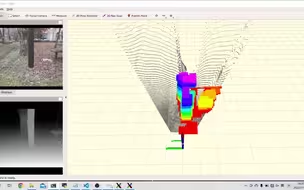
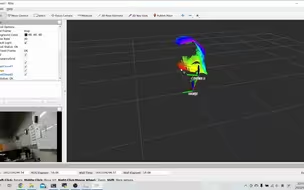
单目点云04
发布人
之前一直是离线分别计算数据,再播放 最近优化了些计算代码,单目深度AI更换成了更轻量的midas-cpp,可以实时了 橘色的是VSLAM的特征点云
打开封面
下载高清视频
观看高清视频
视频下载器
AI_单目稠密点云
单目无人机避障飞行_室内
单目无人机避障飞行_室内2
单目无人机避障飞行_室外02
单目无人机避障飞行_室外
AI_单目稠密点云02
单目无人机避障飞行_室外03
AI单目点云03
在SteamDeck上试试运行ROS,gazebo
ROSbridge,与UNITY通讯
听劝不要轻易入坑SLAM
用ROS来试试RobomasterS1
tello无人机通过yolo进行目标跟踪飞行
两个gapyear老登说国庆没事做一下新赛题😆
ROS和unity通讯进行简易AR
用SteamDeck控制Robomaster S1
ROSbridge,与UE4通讯
ros教程(6)
[艾尔登法环] 拒绝跑酷,无脑应对车轮陷阱
学长说:有佬的帮助就是不一样!!!
ORB_SLAM3构建OCTOMAP
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
PD控制,跟随路径
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解(源码资源链接在简介)
机器人移动底盘
tello跑ORB_SLAM3和VINS
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
成为机器人专家的第一步:掌握这3个前提条件 🤖
【开源无人机】ROS无人机编队代码讲解
NASA 使用 NVIDIA Isaac Sim 模拟火星探测
ROS控制 | 第二轮分站赛qr功能包和语音使用讲解
【开源教程】ROS无人船避障代码讲解
PD控制 用rviz来操控无人机
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
两光电巡线小车
NVIDIA Isaac ROS 3.0:重塑机器人未来
H743 ROS开发验证板
DIY 3D激光雷达(粗枝大叶版)
超维小课堂(三十三):PX4固件没有电流计的情况下校准电调
开箱亚博首款3D深度视觉机械臂,全面感知三维空间,实现精准探索与夹取!