V
主页
27.在ROS中,用Python实现激光雷达避障
发布人
分享在ROS中通过Python节点实现激光雷达避障的方法和步骤。
打开封面
下载高清视频
观看高清视频
视频下载器
二、ROS小车视频教程
ROS零基础入门教程百日谈合集第13期-ROS传感器激光雷达专题
【Autolabor初级教程】ROS机器人入门
机器人操作系统 ROS 快速入门教程
ROS快速入门教程
手把手教你如何通过STM32与N10激光雷达实现小车避障
什么是SLAM
超精简8分钟ros入门教程,实战前够用的基础知识。茴字有四种写法,但你只要会一种
70分钟快速入门Gazebo机器人仿真
机器人操作系统ROS的安装心得以及rosdep问题的处理
20. 在ROS中,使用Python编写运动控制功能
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
【2021.12.20更新】ROS机器人官方视频教程,从0开发ROS机器人
25.在ROS中,用Python实现获取激光雷达数据
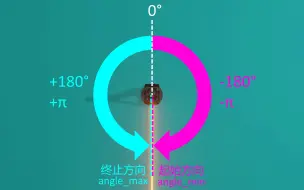
21.激光雷达工作原理
【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统
零基础,如何学习机器人操作系统ROS
当你电赛用了ROS…
24.在ROS中,用C++实现获取激光雷达数据
学习ROS,安装Ubuntu,虚拟机和双系统如何选择
8.ROS 开发神器 Visual Studio Code 的安装和设置
APT源,ROS的软件包应用商店
23. ROS系统中的激光雷达消息包格式
ROS2 哪里难啦?!
22.在ROS中,使用RViz观测传感器数据
15.在ROS中,使用launch文件一次启动多个节点
在Github上寻找安装ROS软件包
如何在 ROS 中保存和加载地图
基于ROS开发的多机器人编队导航系统
37.在ROS中使用自定义消息类型(Python节点)
11.初学ROS,年轻人的第一个Node节点
18.ROS机器人运动控制
【Python】路径规划——机器人避障算法
35.ROS中生成自定义消息类型
40.在ROS中,使用Python发布自定义地图
从没接触过Ubuntu,如何上手ROS开发
5分钟,看懂ROS的Navigation导航系统
【ROS机械臂入门教程】第9讲-视觉避障
12.ROS的主要通讯方式:Topic话题与Message消息