V
主页
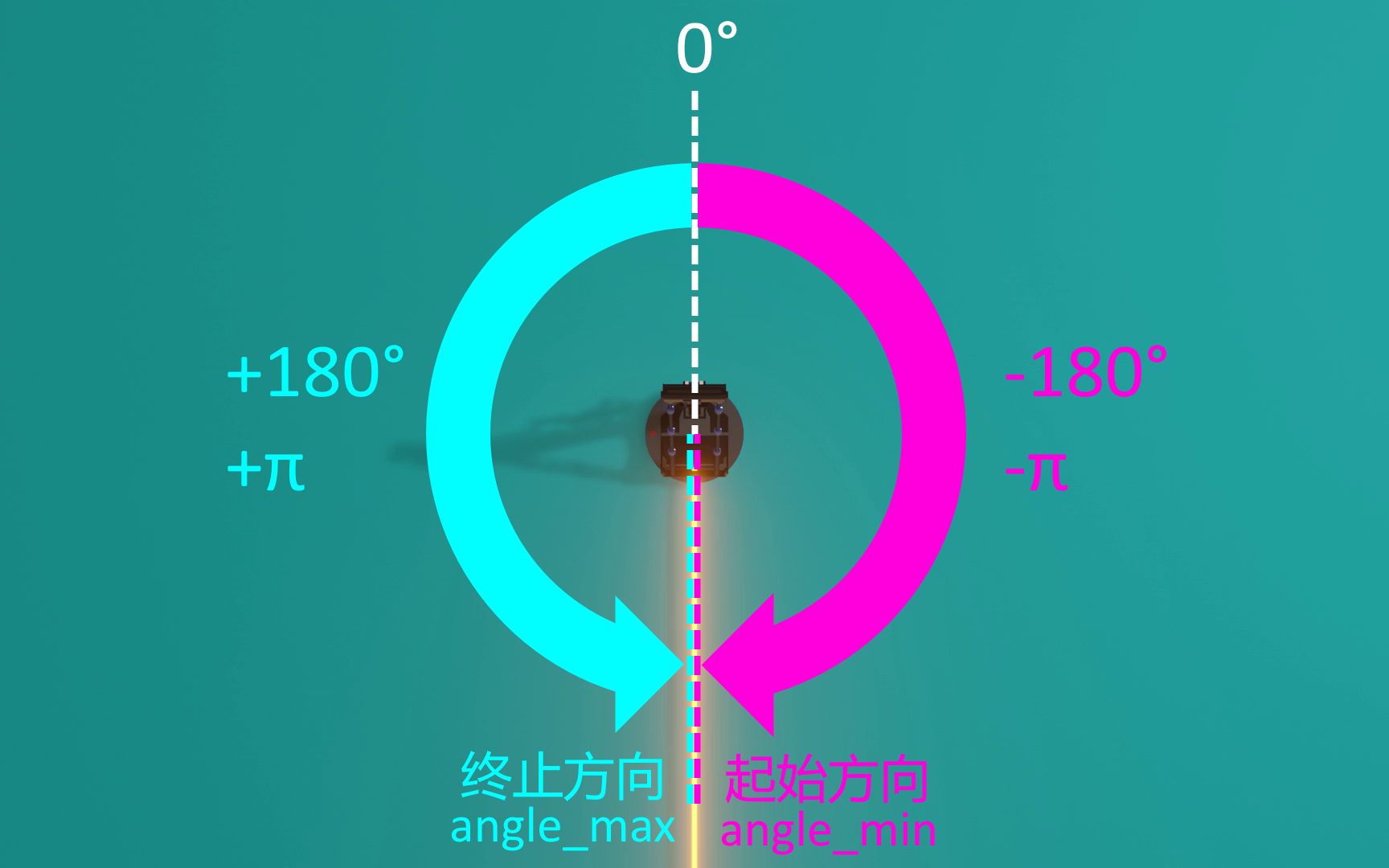
ROS系统中的激光雷达消息包
发布人
详细解析ROS系统中激光雷达消息包的数据结构
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶领域算法解读:基于激光雷达的3D点云目标检测算法,华理博士带你从入门到做自己的Tesla,究极通俗易懂!
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
【赵虚左】《ROS理论与实践》第8、9章--ROS机器人操作系统
ROS,rqt,Rviz和Gazebo的关系
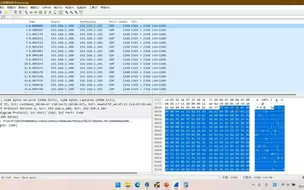
使用WireShark读取激光雷达数据
什么是SLAM
24.在ROS中,用C++实现获取激光雷达数据
ROS零基础入门教程百日谈合集第13期-ROS传感器激光雷达专题
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
【2021.12.20更新】ROS机器人官方视频教程,从0开发ROS机器人
70分钟快速入门Gazebo机器人仿真
【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统
机器人操作系统 ROS 快速入门教程
ROS如何用激光雷达建图
二、ROS小车视频教程
8.ROS 开发神器 Visual Studio Code 的安装和设置
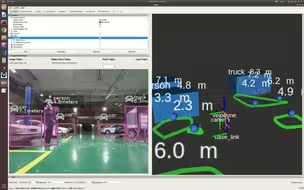
22.在ROS中,使用RViz观测传感器数据
26.在ROS中,用C++实现激光雷达避障
视觉与激光雷达融合感知
25.在ROS中,用Python实现获取激光雷达数据
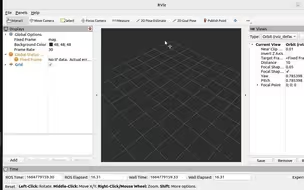
6.2_rviz2基本使用01_安装、启动以及界面布局
Hector_Mapping 年轻人的第一次SLAM建图
如何使用Gmapping进行SLAM建图
什么是里程计
我的毕设演示:基于激光雷达的智能巡检小车
详解激光雷达(完整版)
20. 在ROS中,使用Python编写运动控制功能
【Autolabor初级教程】ROS机器人入门
19.在ROS中,用C++实现机器人运动控制
16.在ROS中,使用Python编写Publisher发布者节点
27.在ROS中,用Python实现激光雷达避障
18.ROS机器人运动控制
APT源,ROS的软件包应用商店
49.Gmapping建图的参数设置
从没接触过Ubuntu,如何上手ROS开发
21.激光雷达工作原理
当你电赛用了ROS…
11.初学ROS,年轻人的第一个Node节点
45.初识ROS的TF系统
ROS导航系统 | AMCL 定位算法