V
主页
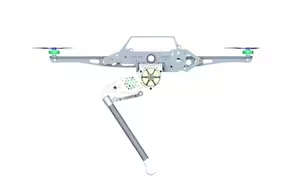
旋翼动态调节姿态
发布人
只要滞空时间足够长,旋翼就能通过反馈调节腿足机器人因腿部运动产生的转动惯量。同时通过算法提高旋翼升力的响应速度。通过旋翼辅助设计制作极高机动性能和稳定性能的腿足机器人。那个时候所有导师都不看好我。
打开封面
下载高清视频
观看高清视频
视频下载器
跳跃一个小台阶
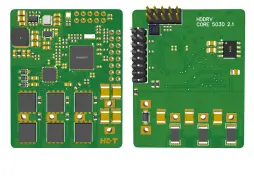
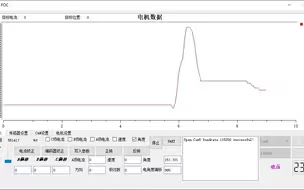
超高精度电流采样
纯SLIP模型和控制方法实现点足式双足机器人动态行走
关节逆驱性能
比较完美的一跃
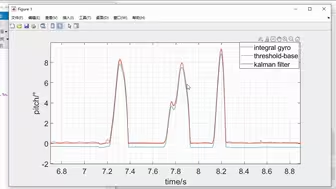
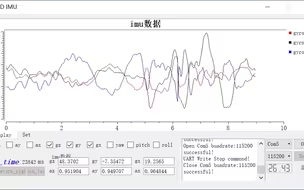
IMU三种估计姿态的方法对比
稳定的站立
高电流采样精度的FOC驱动
双足跳跃
对比卡尔曼滤波和互补滤波方法获取欧拉角
不择手段提高升力响应速度
组合电机
rotor-assisted legged robot
关节执行器
机器人调试
组合电机使用FOC做位置跟踪
超迷你的摆线针轮减速器
运动学
多IMU数据采集
impact resistance test
Design and Control of the Rotor-Assisted PlanarFolding-Leg Robot KOU
FOC电流变化
稳定中心落足点模式
塑胶地面行走
超高精度磁编码器
高精度BLDC三相电流采样
[动漫]机械娘损坏场景 63 (中弹 劈砍 粉碎)
三十年前的老动画至今秒杀一片
EVTOL---利用缩比模型进行倾转旋翼的旋转颤振测试
FOC实现电机高速旋转控制
使用G431自带运放放大和采集电机相电流
某国产IMU测试
机器人Pk美人鱼公主
加步长降步频
限制俯仰角的平面跳跃机器人
组合电机
1分で調べる簡単な変身
测试AS5047P磁编码器静态精度
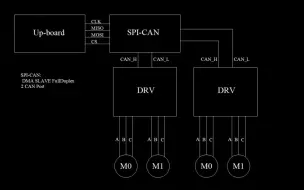
自制up-board的SPI-CAN板子
脱了机甲给大家分食物