V
主页
钢铁侠广工分侠
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
We're gonna start off nice and easy, see if 10% thrust capacity achieve lift.
Position Torque Servo Test
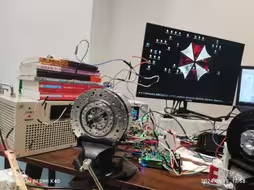
H723 Actuator Stage III: Torque Control Capacity Test
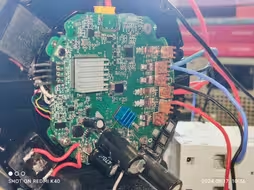
Actuator H723: Orthogonal Field-Oriented Control using Space Vector Modulation
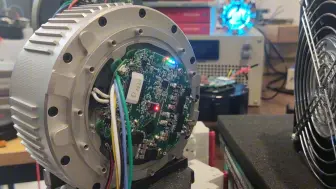
In-Wheel Motor Controller
The Nature of FOC Architecture
复仇者联盟5 - 如果是1950年
新人UP!第一次看【钢铁侠】!金面怒容!简直泰酷辣!!!
Advanced Universal Motor Controller DrvH7: Precision Torque & High Speed
‘马斯克’版‘钢铁侠’,不像假的。
DrvH7 for Motor-91 Achieve 11 Nm (no-reducer) and 7162 rpm (non-load)
UDIRC,优迪小管架UCX2405雪豹FOC无刷外转子四轮转向一步到位
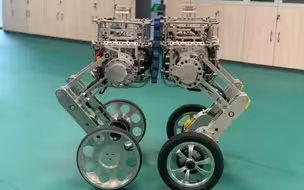
Bipedal Robot Locomotion System
Torque Mode 13.918Nm Achieves Lift without Reducer
Replaceable Modularized FOC Actuator H723 from Watson Dynamics (RMD X8-Pro1:9)
High-Power Actuator V20
F4 Actuator Stage III: Torque Control Test
Handle Robot ?
钢铁侠 4 非官方预告,钢铁侠战甲再升级
我的世界版《钢铁侠3》电影解说(1))
Webots仿真SolidWorks模型导入仿真
当你遇见好的导师时belike
《关于我们群主是楠梁....》
简化平衡步兵LQR控制Webots仿真C语言——带平台的两轮平衡车
Torque Mode 17.65 Nm Achieves Lift without Reducer
我的世界钢铁侠第一期
中动钢铁侠MK3 全身涂装造型还原!曾惊为天人的国产之光!Iron Man
中动战争机器MK1 最照骗的一集!我愿称之成型色水纹侠!
五级倒立摆LQR控制——C语言Webots仿真五阶倒立摆(Five-Link Inverted Pendulum System)
MR+CAD,感觉自己变成了钢铁侠。
Bipedal Wheel-Legged Robot with Direct-Drive Wheel: Design and Experiments
双足机器人学习教程
Replaceable Modularized FOC Actuator H723 from Watson Dynamics (HT04)
研究生高效科研的4个方法,告别文献检索困难
开源控制器Baselinewalkingcontroller:双足机器人平地动态行走
《钢铁侠2》完整版 看钢铁侠是如何加入复仇者联盟的
【强化学习】机器人踢正步阅兵
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
迟来的轮腿进度
波士顿动力 Spot 足臂协同操作