V
主页
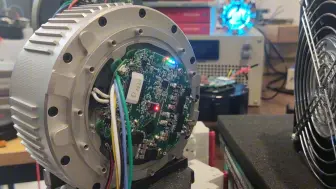
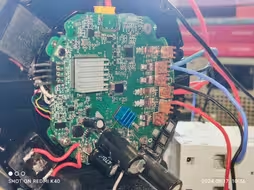
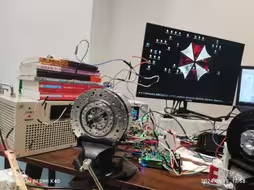
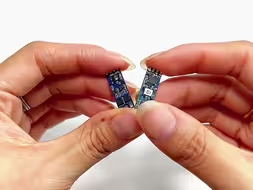
Replaceable Modularized FOC Actuator H723 from Watson Dynamics
发布人
Hardware: - STM32H723VG, DRV8353RS, MA730 - STLINK-V3, CH340C - HT8115-6, DC48V, DZ47S... Software: - Current/Speed/Position Closed-loop Control - Phase&Encoder Calibration, FOC Commutation(Clark、Park、SVM) - USART:921600 Bits/s - CAN:1M Bits/s ... Tool: - STM32CubeIDE - STM32CubeProgrammer - STMStudio - SmartGit ... Test: Maximum non-load rotor speed 240rad/s, 2291.83rpm, with 40kHz PWM&FOC and 48V DC power supply. (GearRate6 => Output speed 40rad/s, 381.97rpm)
打开封面
下载高清视频
观看高清视频
视频下载器
Advanced Universal Motor Controller DrvH7: Precision Torque & High Speed
High-Power Actuator V20
Replaceable Modularized FOC Actuator H723 from Watson Dynamics (RMD X8-Pro1:9)
Position Torque Servo Test
Actuator H723: Orthogonal Field-Oriented Control using Space Vector Modulation
Handle Robot ?
In-Wheel Motor Controller
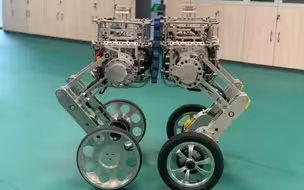
Bipedal Wheel-Legged Robot with Direct-Drive Wheel: Design and Experiments
H723 Actuator Stage III: Torque Control Capacity Test
DrvH7 for Motor-91 Achieve 11 Nm (no-reducer) and 7162 rpm (non-load)
Torque Mode 17.65 Nm Achieves Lift without Reducer
Webots仿真SolidWorks模型导入仿真
The Nature of FOC Architecture
Torque Mode 13.918Nm Achieves Lift without Reducer
Point-Foot Bipedal Robot Based on Reaction Wheel and Closed-Chain Four-Link Leg
F4 Actuator Stage III: Torque Control Test
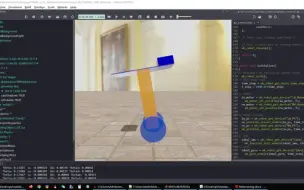
基于STM32H723的一维动量倒立摆Cubli控制系统
科技与狠活30:连肝两周,软硬件全可控,终于解决FOC闭环控制算法,航模电机也能实现大电流控制,还是闭环控制更加的健壮,发热少,振动少,最终效果呈现
双足轮机器人LQR控制——C语言Webots仿真轮腿式双轮足机器人(WLHR, Wheel-Leged Hybrid Robot)双足双轮双足
5.9元无刷电调(DL03)
真.开环foc,简陋版,程序及展示
SVPWM母线利用率的推导
Refactoring of MIT Mini Cheetah Actuator using STM32CubeIDE
科技与狠活31:(干货)无刷电机FOC闭环控制软硬件要点总结,非技术同学可略过,快速点一点,过一过这一个月来三相MOS控制系统之软硬件开发经验
【教程】电机变乐器,让FOC无刷电机唱云宫迅音!
Bipedal Robot Locomotion System
We're gonna start off nice and easy, see if 10% thrust capacity achieve lift.
UDIRC,优迪小管架UCX2405雪豹FOC无刷外转子四轮转向一步到位
FOC,摆线减速器
花费数天自制一款硬件,高性能高功率FOC驱动器,Niko电调
【开源】向佐老师对不起,但是图像追踪
FOC听风者和亲民版听风者对照
Webots仿真Scara机械臂运动仿真
资深猫猫工程师玩转FOC,DSP应用无刷电机控制器,F2800137轻松拿捏FOC
给我一个外形尺寸给你做一台新平面电机
Webots仿真ABB多关节并联结构工业机器人
FOC动量飞轮倒立摆
钢铁侠广工分侠
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
【自制】一台纯手撸的3D打印机械臂