V
主页
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
发布人
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)。依旧使用Windows Webots自带编译环境及裸C实现控制,所见即所得。拉格朗日法动力学建模完整模型描述(不简化作倒立摆),MATLAB符号运算将拉格朗日动力学方程转换为状态空间方程形式,LQR全状态反馈控制。平衡车是经典的非线性机械系统。此Demo对于初学者入门平衡车动力学建模、MATLAB符号运算、LQR控制算法及其C语言实现和Webots控制仿真有全面性帮助;LQR(Linear Quadratic Regulator) #平衡车 #Webots #拉格朗日方程 #LQR # #C语言 #两轮平衡车 #动力学建模
打开封面
下载高清视频
观看高清视频
视频下载器
双足轮机器人LQR控制——C语言Webots仿真轮腿式双轮足机器人(WLHR, Wheel-Leged Hybrid Robot)双足双轮双足
四级倒立摆LQR控制——C语言Webots仿真四阶倒立摆(Four-Link Inverted Pendulum System)
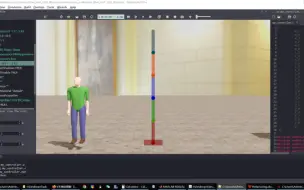
简化平衡步兵LQR控制Webots仿真C语言——带平台的两轮平衡车
五级倒立摆LQR控制——C语言Webots仿真五阶倒立摆(Five-Link Inverted Pendulum System)
C语言二次规划QP算法及MPC模型预测控制算法应用于二级倒立摆Webots仿真模型
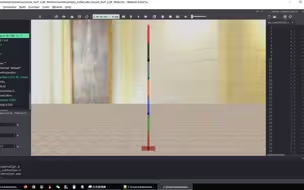
七级倒立摆LQR控制——Webots仿真C语言控制七阶倒立摆(Seven-Link Inverted Pendulum System)
Webots仿真SolidWorks模型导入仿真
这条路不光有剑仙出没,还有哪吒。
Webots一阶直线倒立摆LQR控制仿真(IPS, Inverted Pendulum System)
三级倒立摆LQR控制——C语言Webots仿真三阶倒立摆(TIPS, Triple Inverted Pendulum System on a Cart)
哪吒?火尖枪风火轮我都没有
薛杉杉,楚乔,赵丽颖,三次平衡车萌帅小兔
Webots仿真Scara机械臂运动仿真
Webots下肢二连杆的反演控制——C语言实现Backstepping反步控制
Handle Robot ?
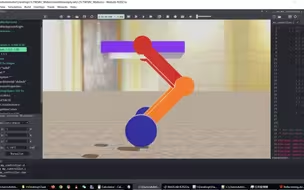
Webots仿真ABB多关节并联结构工业机器人
Webots RMUC 场地环境仿真(RMUC, RoboMaster University Championship)
此系统稳定性为零
Webots仿真Cubli一维动量倒立摆控制系统
Webots二级倒立摆LQR控制系统仿真(DIPC, Double Inverted Pendulum on a Cart)
拆解与维修-平衡车充电器维修
【全700集】清华大佬终于把C语言教程做成了动画片,C语言零基础入门到精通全套教程,全程干货无废话草履虫都能学会!学完即就业!这还学不会,我退出b站!
Webots一阶直线倒立摆PID控制仿真(IPS, Inverted Pendulum System)
来人呐,这平衡车成精了……
Webots二级倒立摆MPC控制——C语言实现二次规划QP算法及MPC模型预测控制算法
Webots 仿真 单桨单摆控制系统
平衡车培训
Webots倒立摆MPC控制——C语言模型预测控制二次规划QP算法 Model Predictive Control Quadratic Programming
Position Torque Servo Test
燃爆!B站独家:射箭与科技骑射交织的射御运动会盛宴!
第一次尝试玩平衡车的幼崽
Cubli单点平衡方块单点站立立方体Webots C语言控制仿真
Actuator H723: Orthogonal Field-Oriented Control using Space Vector Modulation
C语言项目→猜字游戏
C与C++的区别究竟是什么?
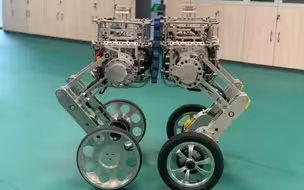
双足轮机器人自由式飞坡合辑——C语言Webots仿真轮腿式双轮足机器人花式飞坡(WLHR, Wheel-Leged Hybrid Robot)
【大一必学】C语言简单爱心代码该怎么敲,如何画出爱心
Webots倒立摆NMPC起摆控制C语言实现——SQP序列二次规划于非线性模型预测控制倒立摆SwingUp
就问穿越机直播平衡车赛不香吗?!
H723 Actuator Stage III: Torque Control Capacity Test