V
主页
京东 11.11 红包
基于环视鱼眼的室外车位检测、建图定位vslam,自动泊车APA、AVP
发布人
分享一个基于环视鱼眼的室外车位检测、建图定位vslam demo,出自stradvision,欢迎同行朋友多交流。
打开封面
下载高清视频
观看高清视频
视频下载器
宝骏云朵+大疆自动驾驶实车体验,行业唯一一款15万以下具备高阶智驾能力的智能电动汽车自动泊车性能咋样?你看好大疆的双目视觉方案吗?
2023上海国际车展魔视智能MOTOVIS感知demo,包括BEV环视3D感知、激光点云感知、激光视觉感知、超声波感知系统等
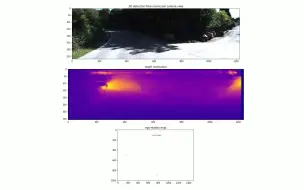
鱼眼单目深度估计地下车库demo,含坡道场景,助力低成本自动驾驶
鱼眼单目深度估计,含上坡、下坡场景,助力低成本自动驾驶,深度估计方向的朋友欢迎多交流
基于地平线视觉感知的多传感器融合定位量产方案,自动驾驶实车测试demo
UniAD: 首个检测、跟踪、建图、轨迹预测,占据栅格预测、规划的全栈端到端网络,CVPR2023,代码已开源
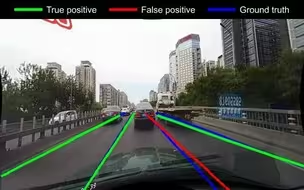
自动驾驶视觉感知之语义分割+车道线检测demo, semantic segmentation+lane detection,期待早日实现无人驾驶
自动驾驶公司技术show系列_3D车道线检测demo_纽劢科技nullmax_中国自动驾驶公司
神经隐式表征在SLAM中的应用探索
环视BEV感知:下一代自动驾驶感知算法新范式,BEVFormer、BEVFormer++、BEVFusion等系列算法分享
自动驾驶充电小车,随时随地充电,让所有车位变成充电车位,下车即走,无需车主操作,这样的商业模式你看好吗?
基于单目深度估计的3D检测和建图demo
CVPR2021车道线检测新工作—LaneATT(Keep your Eyes on the Lane),效果给力,还速度快,FPS达250
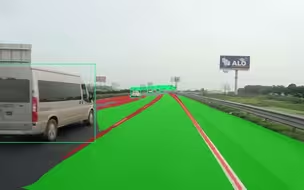
端到端的多任务感知网络:检测、车道线、freespace,性能优于YOLOP。HybridNets: End-to-End Perception Network
小鹏G3 demo视频,全场景自动泊车,斜方车位也ok,实现泊车场景L4自动驾驶,你觉得如何?
YOLOv5目标检测demo KITTI数据集 效果惊人,自动驾驶场景demo YOLOv5自动驾驶
自动驾驶视觉感知技术路线浅析,BEV感知如何落地?未来方向有哪些?
无人驾驶压路机需要哪些技术?自动驾驶技术还能应用到哪些场景?自动驾驶能否普惠大众?
行泊一体、智能泊车大升级,未来出行无忧,纵目科技自动驾驶战略发布会
BEVFormer:基于时空transformer的多摄像头bev,支持3D检测、地图分割等多个自主驾驶感知任务
MAXIEYE智驾科技BEV新范式和NOA真无图产品发布会,路况实测直播
纵目科技行泊一体技术展示,重庆复杂高速道路实测+自主泊车AVP,自动驾驶的未来还有多久?
可行驶区域Freespace检测demo,自动驾驶场景理解关键任务
CVPR2022车道线检测SOTA工作CLRNet在Tusimple数据集测试demo,助力自动驾驶早日落地
多传感器融合感知技术的前沿算法与应用,包括Pointpillars、spconv+、BEVDet、LSS等
国产汽车的自动驾驶也很6,小伙再也不用把时间花在找车位上了,远程启动,自主接人 ! L4自主泊车 纵目科技+红旗汽车
车道线检测小数据训练模型的多场景测试demo(测试集),山城重庆的高速路、快速路测试
拥挤场景下的车道线检测,效果点赞 遮挡也可以检测车道线
今年就业大环境是真难啊,尤其是汽车自动驾驶行业,裁员上市都为哪番?
RoadBEV:基于Bev的道路表面重建。分别利用单目和立体图像估计道路高程,提前捕获道路信息,改善自动驾驶性能!清华大学+加利福尼亚伯克利
大疆智能驾驶首发的五菱KIWI实车APA体验
NVIDIA全链路优化智驾研发,引领自驾大模型时代,自动驾驶场景仿真效果,焉知汽车年会记录
车道线检测新工作,又快又好,自动驾驶的未来再近一步
极越01拿捏窄车位自动泊车
小米汽车自动驾驶最新进展,变焦bev、超分辨率占用网络、道路大模型、端到端感知决策大模型,含晚高峰城市NOA、代客泊车、极窄机械车位泊车等实车demo
nuscenes数据集3D MOT demo,端到端的目标检测和跟踪,检测跟踪联合框架
小鹏自动泊车撞杆
Apollo-HybridAstar 对 DL-IAPS算法的应用展示
复睿智行2023上海车展智能驾驶方案demo,前融合、车道线检测、可行驶区域、4D毫米波等
小鹏P7 NGP辅助自动驾驶实测,自主下匝道,上海高速实测