V
主页
基于地平线视觉感知的多传感器融合定位量产方案,自动驾驶实车测试demo
发布人
地平线科技联合觉非科技分享的“基于地平线视觉感知的多传感器融合定位量产方案”,介绍了融合定位软件框架方案、资源消耗、核心指标、融合定位的设计组成及各模块详细方案介绍。欢迎自动驾驶技术(感知、融合、规控、定位、建图、传感器、嵌入式移植、测试、产品等)的同行朋友进群交流。
打开封面
下载高清视频
观看高清视频
视频下载器
地平线征程5芯片感知算法工程化部署培训,含J5硬件介绍、量化、算子支持等
自动驾驶视觉感知技术路线浅析,BEV感知如何落地?未来方向有哪些?
环视BEV感知:下一代自动驾驶感知算法新范式,BEVFormer、BEVFormer++、BEVFusion等系列算法分享
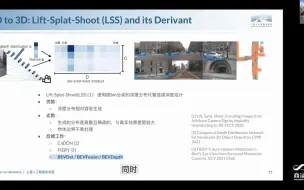
多传感器融合感知技术的前沿算法与应用,包括Pointpillars、spconv+、BEVDet、LSS等
机器人技术在自动泊车场景中的应用和挑战
黑芝麻智能:高性能国产芯片开启中国汽车新时代
小米汽车自动驾驶最新进展,变焦bev、超分辨率占用网络、道路大模型、端到端感知决策大模型,含晚高峰城市NOA、代客泊车、极窄机械车位泊车等实车demo
行泊一体中的感知能力介绍,数据闭环、BEV感知方案等,nullmax纽劢科技CV首席科学家成二康博士的分享
城市记忆领航,实现L3级行泊一体自动驾驶的最佳落地途径 追势科技
MAXIEYE智驾科技BEV新范式和NOA真无图产品发布会,路况实测直播
自动驾驶Nullmax徐雷的主题分享《车载计算平台上实现真正融合的行泊一体》
MapTR: 2022最新的端到端在线矢量化高精地图构建,助力自动驾驶
鱼眼单目深度估计地下车库demo,含坡道场景,助力低成本自动驾驶
FSD V12.5.6.3测评 AI4芯片 模型体积扩大三倍,高速端到端,更早的路线规划?具体怎么样!
有经济承受能力就要买标配激光雷达的高阶智驾系统的整车
基于环视鱼眼的室外车位检测、建图定位vslam,自动泊车APA、AVP
强推!这可能是导师都不讲的自动驾驶最新版教程,不愧是北航硕士团队分享!3小时就带我跑通了自动驾驶感知融合实战!简直比刷剧还爽!
自动驾驶视觉感知之语义分割+车道线检测demo, semantic segmentation+lane detection,期待早日实现无人驾驶
[配音版]视觉激光雷达Vidar,能否代替激光雷达?纯视觉自动驾驶方案可行吗?
极目智能单视觉L2方案征服成都G76魔鬼弯道,全程无接管,自动驾驶的未来你看好吗?
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
从技术到量产,纵目科技拓宽自动驾驶赛道,全资子公司蚕丛机器人引领“自动驾驶+能源”,移动充电机器人
神经隐式表征在SLAM中的应用探索
大模型时代下的端到端自动驾驶(上篇)
鉴智机器人基于端到端建模范式GraphAD的自动驾驶方案PhiAD效果demo,已获得主机厂定点,可能成为业内首个端到端自动驾驶模型的实车部署
行泊一体、智能泊车大升级,未来出行无忧,纵目科技自动驾驶战略发布会
海外博主测试fsd识别假人障碍物还是不稳定就小孩脚踏车识别了
今年就业大环境是真难啊,尤其是汽车自动驾驶行业,裁员上市都为哪番?
👋Arc浏览器的告别与新起点丨终章丨完结丨新产品ing
纽劢科技CEO徐雷:行泊一体4.0的形态演变
百度Apollo Day李昂| 高提纯、高消化的数据闭环设计理念,全面强化自动驾驶的数据炼金术
论文一作李志琦解读BEVFormer: 基于Transformer的自动驾驶BEV纯视觉感知,CVPR2022 workshop,代码刚开源
nuscenes数据集3D MOT demo,端到端的目标检测和跟踪,检测跟踪联合框架
自动驾驶公司技术show系列_3D车道线检测demo_纽劢科技nullmax_中国自动驾驶公司
复睿智行2023上海车展智能驾驶方案demo,前融合、车道线检测、可行驶区域、4D毫米波等
车道线检测小数据训练模型的多场景测试demo(测试集),山城重庆的高速路、快速路测试
鉴智机器人合伙人刘竞秀:以视觉3D理解为核心的下一代自动驾驶系统
车道线检测新工作,又快又好,自动驾驶的未来再近一步
智驾报告|刁难纯视觉?小鹏 P7+ XOS 5.4.0 智驾挑战
视觉激光雷达Vidar:深度图投影到原图构建3D场景,效果如何?能代替激光雷达吗?纯视觉自动驾驶方案你看好吗?