V
主页
神经隐式表征在SLAM中的应用探索
发布人
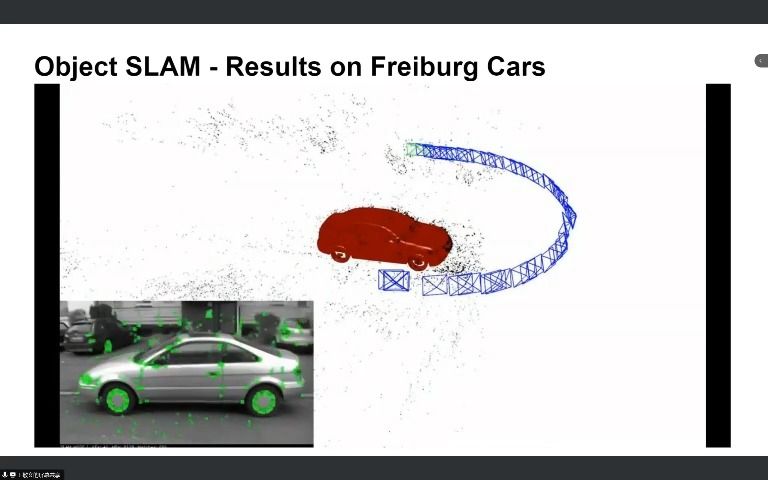
神经隐式表征neural implicit representation作为近几年新兴的场景/物体表征方式已经越来越受到欢迎。最著名的比如NeRF,DeepSDF等方法也已经被广泛用于novel-view synthesis, 场景表面重建等任务中。本次分享将主要介绍和讨论神经隐式表征在SLAM当中的应用。主要包括两大部分:1. 基于NeRF的RGB-D SLAM 和 2. 神经隐式表征在物体级SLAM中的应用。最后也会做一些总结和展望。欢迎同行朋友多交流,一起学习一起玩!课件ppt可私信获取
打开封面
下载高清视频
观看高清视频
视频下载器
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
基于环视鱼眼的室外车位检测、建图定位vslam,自动泊车APA、AVP
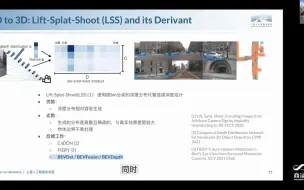
自动驾驶视觉感知技术路线浅析,BEV感知如何落地?未来方向有哪些?
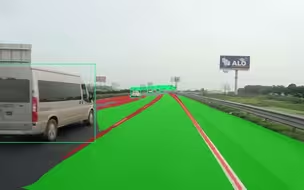
基于单目深度估计的3D检测和建图demo
端到端的多任务感知网络:检测、车道线、freespace,性能优于YOLOP。HybridNets: End-to-End Perception Network
鉴智机器人合伙人刘竞秀:以视觉3D理解为核心的下一代自动驾驶系统
RoadBEV:基于Bev的道路表面重建。分别利用单目和立体图像估计道路高程,提前捕获道路信息,改善自动驾驶性能!清华大学+加利福尼亚伯克利
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
多传感器融合感知技术的前沿算法与应用,包括Pointpillars、spconv+、BEVDet、LSS等
理想汽车自动驾驶应用实践,AICC2021人工智能计算大会上理想汽车自动驾驶AI算法负责人王轶伦的报告
鱼眼单目深度估计,含上坡、下坡场景,助力低成本自动驾驶,深度估计方向的朋友欢迎多交流
自动驾驶独角兽纵目科技新业务蚕丛能源机器人,全球首发,自动驾驶超级移动充电宝,你觉得怎么样?
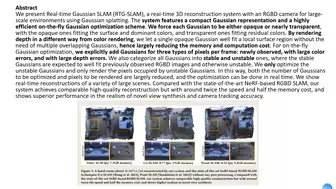
11月15日组会:RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
【CGSAI】SLAM Zero to One
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
CVPR2022车道线检测SOTA工作CLRNet在Tusimple数据集测试demo,助力自动驾驶早日落地
地平线征程5芯片感知算法工程化部署培训,含J5硬件介绍、量化、算子支持等
环视BEV感知:下一代自动驾驶感知算法新范式,BEVFormer、BEVFormer++、BEVFusion等系列算法分享
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
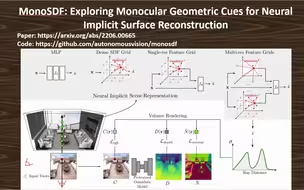
MonoSDF单目表面重建新工作,代码已开源,效果优于Nerf,自动驾驶4D标注、场景重建
自动驾驶入门技术全栈实战解析-1-感知篇
极目智能单视觉L2方案征服成都G76魔鬼弯道,全程无接管,自动驾驶的未来你看好吗?
BEVFusion: 基于统一BEV表征的多任务多传感器融合
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
NeurlPS'24开源 | 迈向SLAM/SfM回环新纪元!MSG:关联场景中共视的地点和目标!
行泊一体算法软件架构的生物进化,行泊一体,舱泊一体,舱行泊一体,自动驾驶还有多久?
百度Apollo Day李昂| 高提纯、高消化的数据闭环设计理念,全面强化自动驾驶的数据炼金术
第五届SLAM论坛高飞报告
鉴智机器人基于端到端建模范式GraphAD的自动驾驶方案PhiAD效果demo,已获得主机厂定点,可能成为业内首个端到端自动驾驶模型的实车部署
fastlio建图与自主导航演示
MAXIEYE智驾科技BEV新范式和NOA真无图产品发布会,路况实测直播
自动驾驶公司技术show系列_2D3D障碍物检测_纽劢科技nullmax_中国自动驾驶公司
今年就业大环境是真难啊,尤其是汽车自动驾驶行业,裁员上市都为哪番?
自动驾驶公司技术show系列_3D车道线检测demo_纽劢科技nullmax_中国自动驾驶公司
CVPR2021车道线检测新工作—LaneATT(Keep your Eyes on the Lane),效果给力,还速度快,FPS达250
鱼眼单目深度估计地下车库demo,含坡道场景,助力低成本自动驾驶
纽劢科技CEO徐雷:行泊一体4.0的形态演变
无人机SLAM入门教程(一):课程概述1.3 传感器简介