V
主页
京东 11.11 红包
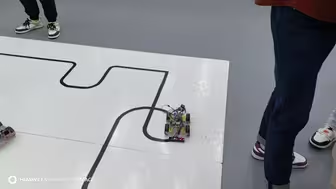
2024年TI杯全国大学生电子设计大赛MSPM0G3507开发板宽度小于15cm的轮式小车PID闭环控制巡线原理讲解与效果演示代码开源
发布人
本期视频主要是介绍小车车体和硬件部分、效果演示、讲解编码器数据获取(外部中断获取方法)、讲解电机PID闭环控制、简单概述CCD模块、简单讲解电机驱动控制
打开封面
下载高清视频
观看高清视频
视频下载器
循迹小车-8.PID-PID控制直流电机转速
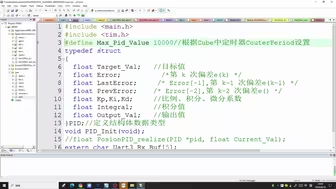
第11课.底层-电机PID控制算法代码讲解
基础PID控制电机(附原码)
PID控制原理,看了开头,你就会看到结尾!
智能小车制作教程(基于stm32)
用PID技术控制小车跑直线
全网首发!2024电子设计大赛(电赛H题)1-4问全流程无加速无剪辑小车演示视频,感兴趣的同学一键三连后私信主播获取相关资料
pid巡线(失败大哭😭)
PID参数整定——临界振荡法【目前最简单最实用的PID教程】第十二讲
从不懂到会用!PID从理论到实践~
重磅!!2024电子设计大赛控制题E、H题详细免费方案讲解,非常详细保姆级教学,一键三连后私信主播或者进入直播间获得后续更新方法
stm32驱动编码器电机转动和测速代码讲解
全网最通俗易懂的PID算法程序代码实现!
2024电赛小白入门 手把手教你做一辆电赛小车|STM32|MSP432|PID|MPU6050
OpenMV视觉巡线(寻线)开源详细讲
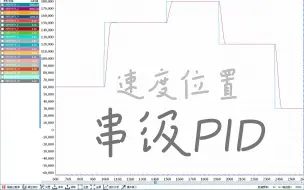
开源:速度位置串级PID控制系统,代码简介处两个币自提,使用V6编译器
感为八路红外巡线模块的使用与程序移植
增量式PID速度控制中的PID参数简易调整
开源:位置式PID控制直流电机,实现位置控制
五路红外循迹小车演示,可给代码
线性CCD循线例程介绍
大学生电子设计大赛培训
草履虫都能学会的STM32平衡小车教程(基础篇)
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
PID电机速度闭环控制-PID算法(章节:8.3-PID算法初步体验与算法理解)
PID封装和双环PID控位置
备战TI杯基于MSPM0G3507寻迹小车
2024电赛TI杯MSPM0G3507小车模板,适用于两轮小车,四轮小车,调试方便,包含原理图和pcb、代码,插模块即可使用,车辆大小满足电子设计大赛要求
2020年电赛c题 40度爬坡! 坡道小车msp430f5529 ccs开发 四路寻迹模块 搭载mpu6050陀螺仪 电赛冲冲冲!
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
[全国大学生电子设计竞赛]电赛国一作品 智能送药小车
2024电赛TI杯MSPM0G3507小车模板,阿克曼舵机小车结构,简单移植易上手,升级的舵机版,多一份准备多一份安全
长话短说 霍尔传感器编码器测速原理分析
pid位置环,陀螺仪闭环,旋转90-180度
2024年电子设计竞赛解析及安排
轮趣L130X智能小车底盘,宽度小于15cm,精巧迷你体积,附赠功能源码资料
智能小车 - 巡线小车教程 (红外巡迹原理,脉轮,STM32)
串级PID控制,速度环,转向环,角度环(GY521),巡线〖开源〗
pid红外寻迹模块原理
临近电赛前的MSP430/MSP432的简易环境搭建(CCS IDE)