V
主页
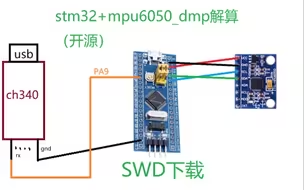
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
寻迹中加入mpu6050转向真的稳。诚恳大佬批评指正。冲冲冲
学习心得|基于卡尔曼滤波的MPU6050姿态解算
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
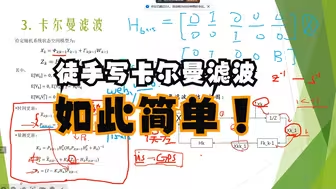
徒手写卡尔曼滤波与组合导航(上)
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
mpu6050 控制小车直线行驶,pid算法复位。
MPU6050+DMP获取姿态解析
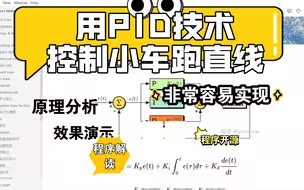
用PID技术控制小车跑直线
6.代码篇----mpu6050以及PID控制
MPU6050卡尔曼滤波
MPU6050漂移校准解决方案 用Python快速秒杀
循迹小车-8.PID-PID控制直流电机转速
串级PID控制,速度环,转向环,角度环(GY521),巡线〖开源〗
5分钟玩转(mpu6050/陀螺仪/GY-521)角度传感器篇,附源码
【PID寻迹小车】调参调到吐了,有直线、直角、锐角、圆弧转弯,基于STM32两轮差速小车。
卡尔曼滤波,6轴姿态解算,俯仰角,翻滚角,三连+关注私信发工程
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
平衡小车PID调节过程,直立、速度、转向环,代码开源
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
串级PID~小车直线行驶
PID封装和双环PID控位置
[电赛必备][开源]PID巡线[权值法]
【开源】PID循迹小车2
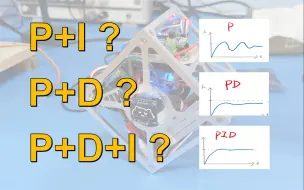
【电赛】PID算法的常用组合和调参步骤 (串级/并级/舵机环/速度环/直立环/转向环/距离环...)
(STM32单片机+MPU6050)改进了代码,比之前稳定不少!这次用的卡尔曼滤波,并且是在keil5写的,我感觉写的满简洁的,各位有需要我可以分享一波
从不懂到会用!PID从理论到实践~
速度环+位置环串级pid[附源码]
差分两轮小车利用PID双速度环跑直线
标准库DMP移植,MPU6050陀螺仪解算
【Arduino】MPU6050 测欧拉角 带卡尔曼滤波 自动修正yaw角(附代码)
简易版 PID 小车跑直线
如何处理电子陀螺仪MPU6050的零点漂移问题
基础PID控制电机(附原码)
电赛H题小车,4题全程序,mspm0g3507+mpu6050,角度PID闭环
加陀螺仪的小车果然直
2024年TI杯全国大学生电子设计大赛MSPM0G3507开发板宽度小于15cm的轮式小车PID闭环控制巡线原理讲解与效果演示代码开源
【浅显易懂】卡尔曼滤波原理解读
PID算法 让小车跑出了优美的直线
CH32读取MPU6050姿态数据(卡尔曼滤波法)