V
主页
京东 11.11 红包
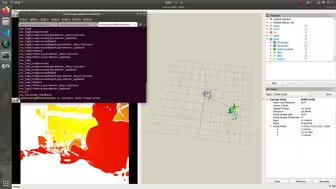
工业相机、事件相机、红外相机联合标定
发布人
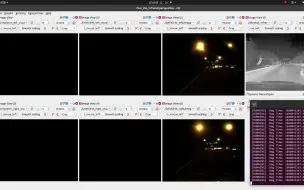
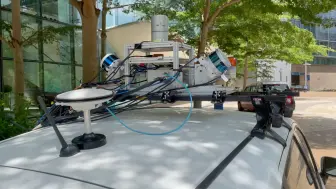
ECMD: An Event-Centric Multisensory Driving Dataset for SLAM Leveraging multiple sensors enhances complex environmental perception and increases resilience to varying luminance conditions and high-speed motion patterns, achieving precise localization and mapping. This paper proposes, ECMD, an event-centric multisensory dataset containing 81 sequences and covering over 200 km of various challenging driving scenarios including high-speed motion, repetitive scenarios, dynamic objects, etc. ECMD provides data from two sets of stereo event cameras with different resolutions (640*480, 346*260), stereo industrial cameras, an infrared camera, a top-installed mechanical LiDAR with two slanted LiDARs, two consumer-level GNSS receivers, and an onboard IMU. Meanwhile, the ground-truth of the vehicle was obtained using a centimeter-level high-accuracy GNSS-RTK/INS navigation system. All sensors are well-calibrated and temporally synchronized at the hardware level, with recording data simultaneously. We additionally evaluate several state-of-the-art SLAM algorithms for benchmarking visual and LiDAR SLAM and identifying their limitations. The dataset is available at https://arclab-hku.github.io/ecmd/.
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶场景之——夜晚高速路上事件相机、红外相机、普通相机的感知情况对比
基于事件相机的多传感器汽车平台
自动驾驶场景之——城市道路及高速路上事件相机、红外相机、普通相机的感知情况对比 2
可见光通信在IOT上的应用
事件相机数据slider_depth可视化
友人回忆录
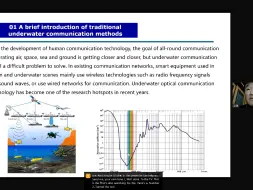
无线光通信感知一体化的技术与发展
基于stm32的具有可见光通信功能的LED阵列
自动驾驶场景之——密集城市下事件相机、红外相机、普通相机的感知情况对比
基于VICON与AMCL的turtlebot2定位与导航
基于可见光通信的移动机器人室内定位与导航 (Robot Indoor Localization using Visible Light Positioning)
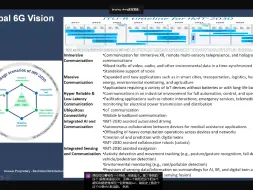
面向6G 的可见光通信
《人渣反派自救系统》英文版开篇精读,看原耽也可以学英语
基于单目事件相机的半稠密深度重建_testing1
【雅思口语8.5】得此视频者是白嫖天选人
照明的方向控制:照明、传感和通信的应用,
覆盖均匀的高容量无线光VCSEL 阵列发射机
面向显示与光通讯应用的氮化镓基Micro-LED 最新进展
基于micro-LED 的高速可见光通信技术
《放学等我》也有英文版!超适合入门读的英语小说
基于可见光通信的智能广告灯
【实时学习视频】秋日阳光|沉浸式陪伴学习|study with me|轻音乐|自习室
LED通信功能是使LED照明和显示产业迭代升级的关键
基于 Kinec的3D重建
evio_testing2
flvis_l515
基于turtlebot3的自动驾驶的道路识别仿真
PL-EIO 第三人称视觉测试 Dvxplorer
用欧路词典实现无痛全英小说阅读,只需要2步!
全日语vlog|98年女生 月入1w5 互联网日企早九晚五打工的一天
evio_testing1
EVIO_for_standard_frame
用于水下移动机器人的蓝绿LEDLD光通信设备测试
视觉惯导紧融合VINS-Mono的复现
匾额“克嗣徽音”原来有如此寓意,一起了解一下吧
基于stereo camera的视觉里程计的实现
Event Camera Demo Introduction 1.0
l515_vinsmono_demo_testing
cartographer_3D_LiDAR_SLAM——WithLandmarks
livox_Mid_40_real_test_livoxloam