V
主页
京东 11.11 红包
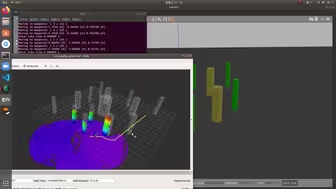
基于 Kinec的3D重建
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
基于Prometheus自主无人机开源项目的学习与仿真
Robust Robotic Localization using Visible Light Positioning and Inertial Fusion
基于VICON与AMCL的turtlebot2定位与导航
【开源教程】ROS+PX4开源机械臂控制(下)
三维重建之——Voxblox testing in cow and lady dataset
【开源教程】ROS+PX4开源机械臂控制(上)
基于3D-LiDAR的Astar路径规划
【开源无人船】从零组装一艘测绘无人船
单机器人自主探索建图(1)
esvo_time_surface
dvs_velodyne_gazebo_simulation
基于2D-LiDAR的APF路径规划
ROS控制 | 第一轮控制功能包讲解
基于Kinect的3D重(最终建图效果)
LVI_SLAM复现(3D LiDAR SLAM)
Multi-sensor fusion for VLP-SLAM localization and navigation
dvs_gazebo_simulation
【开源无人机】零基础首飞一架开源无人机
基于可见通信的机器人与行人同时定位导航系统
(激光雷达实时三维重建)ImMesh Testing using hku_main_building
swarm-ego-planner复现(基于多无人机)
【开源无人船】ArduPilot飞控连接MAVROS
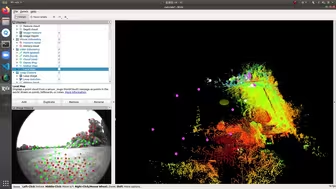
Mono-VINS-DenseMapping (单目VIO+单目稠密重建) 分辨率346*260
LIO-SLAM复现(3D LiDAR SLAM)
MSCKF-VIO
Robotic Localization System based on Multi-Sensor Fusion for VLP and SLAM
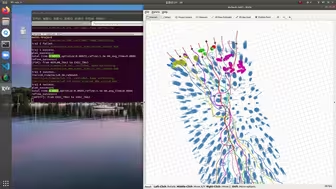
基于单目事件相机的半稠密深度重建
事件相机数据slider_depth可视化
two_turtlebot2_LiDAR-SLAM_cartographer
Gaussian Splatting SLAM
LIO-SAM_kitti_00
ROS无人机仿真之轨迹跟踪
evio_testing3
Demo:Multi-robot Cooperative Localization based on VLP and Odometer
基于nsh_indoor_outdoor数据集的LeGO-LOAM复现(3D LiDAR SLAM)
esvo_core_mvstereo
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
基于单目事件相机的半稠密深度重建1
(激光雷达实时三维重建)ImMesh Testing using hku_park_01
通过LiFi 进入6G 时代