V
主页
京东 11.11 红包
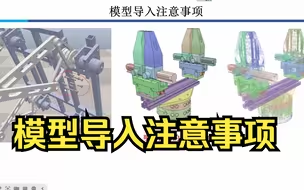
技术实例-外部机器人模型导入Coppeliasim(由模型生成关节)
发布人
我的QQ:3336989737 欢迎讨论交流
打开封面
下载高清视频
观看高清视频
视频下载器
55-Coppeliasim与Matlab连接
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
串联机器人中的关节
实例 手把手搭建Webots四足机器人(机器狗)
机器人坏了 要动手修理一下
机器人dh法动画
vrep.coppeliasim.Solidworks模型导入注意事项
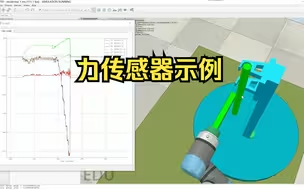
力传感器示例
3-11自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)的仿真实例vrep.coppeliasim
是西湖边慢跑加机器人按摩的一天
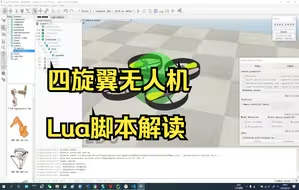
vrep.coppeliasim四旋翼无人机脚本解读
新到的婚纱版陆雪琪手办呀
3-7自主移动机器人-运动合成作用建模-四轮差动底盘(机器人)的仿真实例vrep.coppeliasim
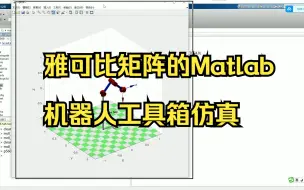
4-9雅可比矩阵的Matlab机器人工具箱仿真
7-1机器人控制系统的特点及控制方式
6-3关节空间的轨迹规划
6-6关节空间的高阶多项式插值
技巧-1 vrep.coppeliasim脚本编辑器参数调整及更改为其他编辑器
6-13轨迹规划的Matlab仿真
4-2机器人速度雅克比矩阵与速度分析
13-vrep.coppeliasim场景对象-接近觉传感器
中美机器人到底谁强?
3-19六自由度机器人Matlab机器人工具箱建模
技巧-1补充-Vrep Coppeliasim使用VS Code作为脚本编辑器的设置方法
10-2vrep.coppeliasim场景对象-形状的动力学材料属性
11-2vrep.coppeliasim场景对象-关节模式及编程
10-1vrep.coppeliasim场景对象-形状属性
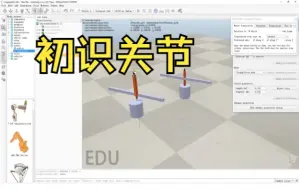
11-1vrep.coppeliasim场景对象-初识关节
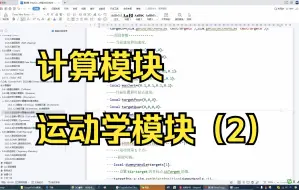
22-vrep.Coppeliasim计算模块-运动学模块(2)
04-vrep.coppeliasim对象common属性及相应脚本操作
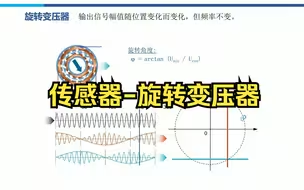
8-4传感器-旋转变压器
6-4关节空间的三次多项式插值
实例 vrep.coppeliasim4轮差动小车控制
Object is model base的补充说明
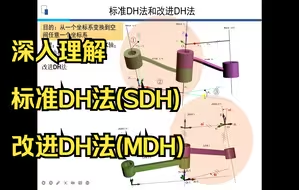
深入理解标准DH法(SDH)和改进DH法(MDH)
matlab机器人工具箱安装
粉丝答疑:vrep.coppeliasim关节力矩的设置
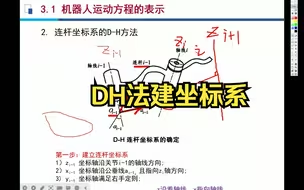
3-3DH法建坐标系
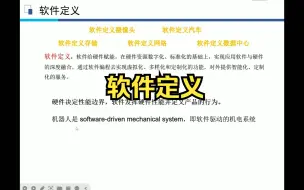
2-00软件定义
15-vrep.coppeliasim场景对象-力传感器