V
主页
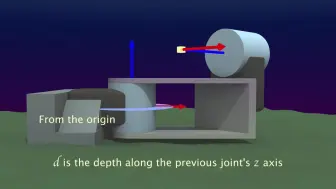
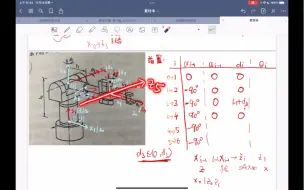
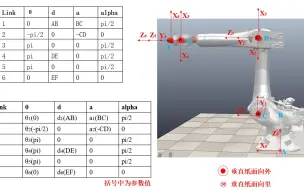
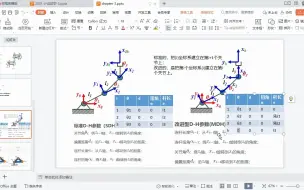
深入理解标准DH法(SDH)和改进DH法(MDH)
发布人
我也写了笔记和配套实例,可qq联系3336989737
打开封面
下载高清视频
观看高清视频
视频下载器
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
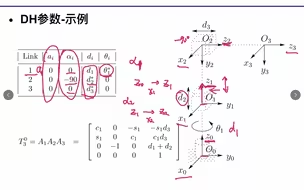
空间机器人技术-建模与控制基础:13.DH参数举例
机器人DH法、运动学、雅克比(Jacobian)矩阵
机器人运动控制简明教程 第二节 DH参数与机器人运动学
六自由度机械臂讲解(含DH模型与正逆运动学讲解)
机器人学:建模、控制与视觉——华中科技大学
机器人DH模型 3D讲解
【机器人机构学】DH参数法讲解-基于定义出发
机器人学 1.19 标准DH参数
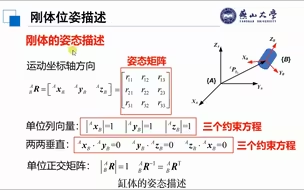
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
机器人建模和控制
六自由度工业机器人DH建模与逆运动学仿真
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
工业机器人技术基础(完)
机器人 运动学 基础 经典DH变换
SDH光传输技术与应用-SDH基本原理-网课讲解
4. 机械臂集合法与DH表示法
(10)标准DH参数详解+案例分析【1】|《动手学机器人学》
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
改进DH参数详解
3.2 机器人DH参数表达法
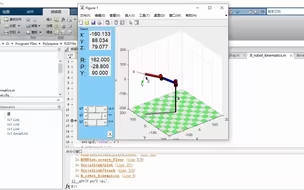
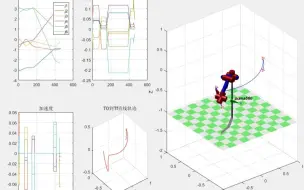
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
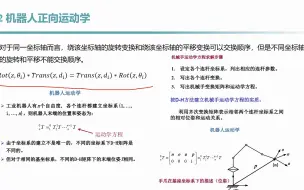
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划
《动手学机器人学》(3)-齐次坐标与变换矩阵
机器人运动学-逆运动学
两分钟学习:四足机器人DH参数法
【Matlab机器人工具箱】- 运动学①---建立机器人模型--1、Link类 2、SerialLink类
3-3DH法建坐标系
5-D-H经典方法和改进方法 MATLAB实现
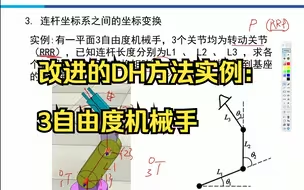
3-9改进的DH方法实例:3自由度机械手
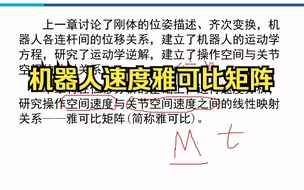
4-1机器人速度雅可比矩阵
机器人学 1.20 用标准DH参数建模Aubo机械臂
工业机器人组成
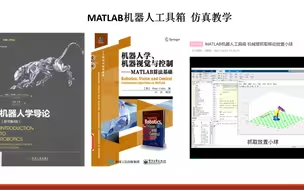
MATLAB机器人工具箱10.4 机械臂仿真教学(未完结)
机器人学 1.23 用标准DH建模的一些例子 以及 逆运动学求解
3-0机器人模型及连杆
机器人动力学拉格朗日法详细推导(二连杆机械臂)
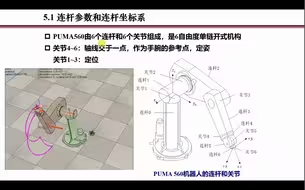
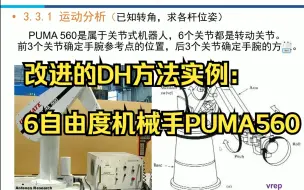
3-10改进的DH方法实例:6自由度机械手PUMA560