V
主页
京东 11.11 红包
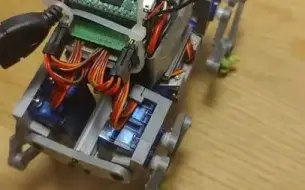
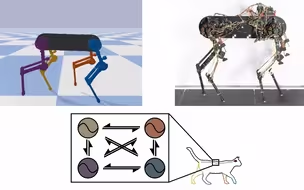
【搬】Vitruvio_ 用于行走机器人的开源腿部设计优化工具箱
发布人
https://www.youtube.com/watch?v=so-qvAg_qyQ 我们提供了一个开放源代码框架,可为步行机器人开发最佳的腿部设计。腿部设计参数针对用户定义的指标进行了优化,例如能耗的最小化或执行器峰值扭矩,使用户能够更好地浏览高维度和直观的设计空间 https://github.com/leggedrobotics/vitruvio https://doi.org/10.3929/ethz-b-000429676
打开封面
下载高清视频
观看高清视频
视频下载器
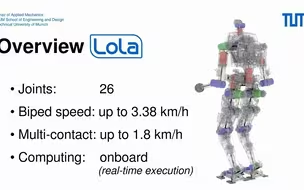
【搬】人形机器人 LOLA - 自主多接触运动的行走模式生成
【搬】四足机器人相关研究的预告摘要视频集
【搬】用于高级移动技能的离线运动库和在线 MPC
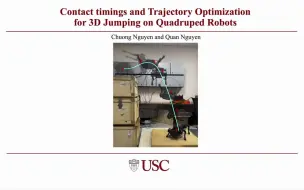
【搬】四足机器人 3D 跳跃的接触时间和轨迹优化
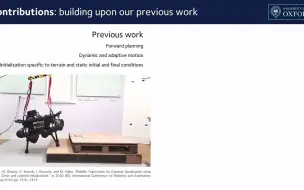
[介绍]具有学习初始化的后视知觉轨迹优化
[KEI220] 基于Jansen腿部机制的设计
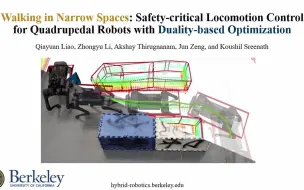
【搬】在狭窄空间行走 NMPC DCBF 对偶性
行走机构验证
耐冲击腿部结构
【搬】用于无传感器动态交互任务的可反向驱动的六自由度并联机器人
【搬】ICRA 2022 Sim2Air - 用于无人机监控的合成航空数据集
RoboDog:我喜欢移动它
【搬】Mini12自由度舵狗
【搬】用于四足机器人的自适应 CLF-MPC方法
【开源】舵机机器人控制板-舵狗控制板-高度集成-ESP32S3主控-18路PWM信号输出
成本低廉 | 软硬件开源机器猫 CaT | 四足机器人 | 人工智能机器人 | 开源机器人 | 机器狗
基于LiDAR里程表的自我监督学习的四足机器人应用
【搬】基于图的多传感器融合的自主建筑机器人定位(讲座)
【搬】四足机器人如何学会徒步
【搬】TAMS:开发多用途三臂空中机械手系统
外国小哥哥做的开源12自由度舵狗仿真欣赏
【搬】爬楼梯小车
【搬】飞行多体机器人的质心空气动力学建模与控制
【搬】BirdBot,一种以鸟腿为灵感的节能机器人腿
Go2开发教学10-SLAM 导航服务接口
【搬】在闭环中心模式生成器中学习机器人动力学的塑性匹配
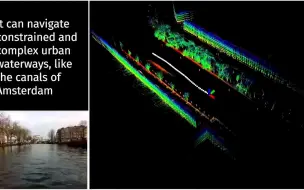
【搬】Roboat - 自主机器人船欣赏
用于核环境表征的自主分布式3D辐射场估计
【留学日记#253】机器狗站不起来了(2024.7.29-30)
V60 v5 Beta测试Nov1520
【搬】ANYmal在DARPA SubT比赛中的表现
显眼包助力马拉松#机器人也爱显摆
【搬】采访机器人专家:认识汤姆 | 波士顿动力
这只机器狗成精了 | 像人一样爬梯子 | 欧洲最强机器狗 ANYmal | 具身智能 | 神经网络 | 人工智能 | 四足机器人
捕捉minipupper(•͈˽•͈)
强化学习四足机器人二
用于快速紧急部署AGRO的动力学和空中姿态控制[IROS 2020]
【搬】复合减速方案欣赏
CoAD SU20系列讲座— Brian Ringley
超魔改PWM舵机之力控触觉演示(EX6)