V
主页
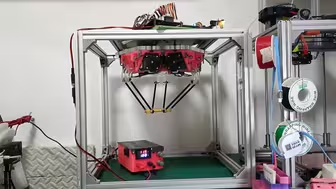
【搬】用于无传感器动态交互任务的可反向驱动的六自由度并联机器人
发布人
https://www.youtube.com/watch?v=XzKstux4Rag 论文 https://doi.org/10.1016/j.rcim.2023.102642
打开封面
下载高清视频
观看高清视频
视频下载器
做机器人有必要了解下这种机构
6轴并联机器人
Delta并联机器人正逆运动学仿真
开源项目:3D打印制作—球形并联机械结构
Delta并联机构,看完这个你应该可以复现出来
运动学| Hexapod(Gough-Stewart平台)六轴并联机器人
3-PRS并联机器人
最快的五杆并联机器人DexTAR
发那科六轴并联机器人结构…
【搬】轮、足模式切换欣赏
Mori3 - 环形滚动
国外新方案6轴G座舱方案放弃了丝杠传动
【开源啦!】无刷轮腿平衡机器人
逐际动力发布首款四轮足机器人,以运动智能突破足式产品的落地和应用
【搬】折叠机器人
Deviant-2.新型四足轮式机器人
【搬】好酷的波士顿动力开发中心
这种机器人可有人见过,好神奇!
只是补偿重力,没啥技术含量
机器人学基础:并联机器人运动学与动力学分析
【搬】变形旋转跳跃机器人
【搬】3D 打印优化特斯拉的 Optimus 机器人
本科毕设-轨道机器人自适应调压底盘
有没有大流量的热端,推荐一下呗。
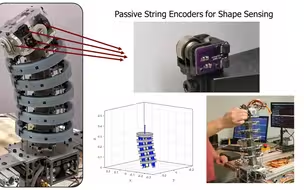
【TRO】 变曲率连续体机器人形状传感的李群公式及灵敏度分析
【搬】DIY轴向磁通电机
矢量模块(舵轮)装配|SolidWorks|FRC8069
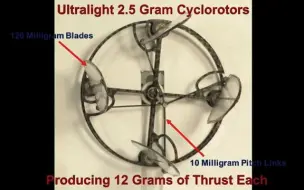
【搬】29克的摆线旋翼机
前沿|创意机器人——通过膨胀或收缩车轮主动改变形状
【搬】上楼梯机器人
并联机器人 vs 串联机器人,两者旗鼓相当,有点意思……
【搬】带尾巴的双足机器人自调步态
【搬】高速机械臂欣赏
【搬】轮滑
并联机器人打造弯曲的艺术
完美重力补偿装置
串联和并联机器人运动学与动力学分析
【搬】DIY基于滚珠丝杠的机器腿
人形机器人,并联结构Whole-Body Control of Series-Parallel Hybrid Robots
饮料摇匀器——VR观影的最佳搭档体验