V
主页
【搬】四足机器人 3D 跳跃的接触时间和轨迹优化
发布人
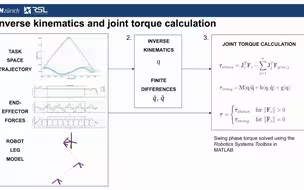
https://www.youtube.com/watch?v=d7RcWEXTbqc 论文 https://arxiv.org/abs/2110.06764 执行具有长飞行阶段的高度敏捷的杂技动作需要完美的时机、高精度和全身动作的协调。为了应对这些挑战,本文提出了一种新颖的时序和轨迹优化框架,用于有腿机器人执行激进的 3D 跳跃。在我们的方法中,我们首先利用一个有效的优化框架,使用简化的刚体动力学来求解接触时间和机器人身体的参考轨迹。然后使用该模块的解决方案来制定基于机器人全非线性动力学的全身轨迹优化。这种组合使我们能够有效地优化接触时间,同时保证可以在机器人硬件中有效实现的跳跃轨迹的高精度。我们首先在 A1 机器人模型上验证了所提出的框架对于各种 3D 跳跃任务(例如从 2m 高空进行双后空翻)的效率。然后,分别从高度为 0.4m 和 0.9m 的盒子成功地对各种激进的 3D 跳跃运动进行了实验验证,例如斜跳、滚桶和双桶滚。
打开封面
下载高清视频
观看高清视频
视频下载器
【搬】倒立摆机器人克服台阶的动力学分析
【搬】Vitruvio_ 用于行走机器人的开源腿部设计优化工具箱
【搬】训练diy四足机器人笨笨跳
Gerardo Bledt(麻省理工学院):推广和改进腿式机器人的正则化预测控制
【搬】四足机器人相关研究的预告摘要视频集
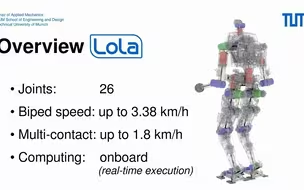
【搬】人形机器人 LOLA - 自主多接触运动的行走模式生成
TIMA机器人平台和ROZUM ROBOTICS
【搬】使用学习动力学的神经网络梯度进行轨迹优化
近距离接触【asimo】
右边两足走路也是双足行走
舵狗设计制作(第1部分)之测试动作
【搬】基于分布学习的快速且计算效率高的基于采样的局部探索规划
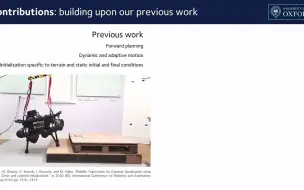
[介绍]具有学习初始化的后视知觉轨迹优化
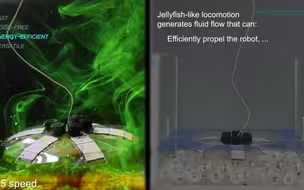
【搬】水母状机器人
依托自研关节电机组件的机器人,可实现载人行走。四足狗售价3.9万,关节电机售价2499。
CORL 2024,可微分仿真学习四足机器人运动
RoboDog:我喜欢移动它
强化学习四足机器人二
网络spot三维图欣赏
显眼包助力马拉松#机器人也爱显摆
【搬】机器人欣赏
无人车载四足机器人巡检 再加上无人机就更全面了
新西红柿狗腿子之【活动范围简单展示】
【搬】复合减速方案欣赏
这只机器狗成精了 | 像人一样爬梯子 | 欧洲最强机器狗 ANYmal | 具身智能 | 神经网络 | 人工智能 | 四足机器人
成本低廉 | 软硬件开源机器猫 CaT | 四足机器人 | 人工智能机器人 | 开源机器人 | 机器狗
【搬】SOLOBACKFLIP - 产生一个完整的后空翻
【搬】MIT的迷你组装机器人欣赏
基于LiDAR里程表的自我监督学习的四足机器人应用
强化学习爬楼梯
【波士顿动力】中文字幕|米其林工厂的Spot
【搬】 黎曼运动策略与全身控制的动态腿运动集成
任赜宇博士公开课 中
机器狗采矿竞赛
【搬】基于图的多传感器融合的自主建筑机器人定位(讲座)
捕捉minipupper(•͈˽•͈)
V60 v5 Beta测试Nov1520
【机甲产品】全网火爆销量的四足机器人打包流程分享
【搬】小制作欣赏
【毕业设计开源】机器人全栈开发,四足机器人系统设计【优秀毕设】