V
主页
隐式扫掠体积SDF:任意形状机器人连续碰撞避免轨迹生成
发布人
Video for the SIGGRAPH 2024 & TOG: Implicit Swept Volume SDF: Enabling Continuous Collision-Free Trajectory Generation for Arbitrary Shapes. github: https://github.com/ZJU-FAST-Lab/Implicit-SVSDF-Planner (coming soon)
打开封面
下载高清视频
观看高清视频
视频下载器
“人机合一”|南京航空航天大学自定义控制器远程体感操作工程机器人机械臂兑换矿石
rugged car : a system for autonomous motion in complex environments
【IROS 2021】基于视觉和编码器的无人机悬挂负载状态估计
Box有向距离场(SDF)的推导
[IEEE VR 2023 (TVCG track)] LIP: 巧妙融合惯性与激光雷达多模态稀疏观测,将你的动捕场景从拍摄棚拓展到足球场
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
中山大学 STAR 课题组2023研究成果速览:旋翼无人机;主动感知;实时规划;移动操作;集群
RACER: 多无人机协作快速探索 IEEE TRO Best Paper
【CoRL 2023】大佬吵架现场精彩片段Debate:Is Scaling Enough to Deploy General Purpose Robots
吊载无人机系统的灵巧运动规划与控制(Impact-Aware Planning and Control)
[CVPR 2023] NeuralDome:一个使用于超多视角人物交互的神经建模技术管线
哥们中了一篇CVPR2024,做了一个完整版视频记录
ROBOMASTER2023-2024 机甲大师高校人工智能挑战赛·精英赛 | 冠军 | Turtle战队 | 完赛视频 | 系统方案 | 算法原理
Swift-Mapping: Online Neural Implicit Dense Mapping in Urban Scenes
我和我飞导【浙江大学FAST Lab】
Distributed Swarm Trajectory Optimization for Formation Flight in Dense
四旋翼无人机追车实战
MPC + 强化学习![ICRA 24] Actor Critic Model Predictive Control
Sparse-Graph-Enabled Formation Planning for Large-Scale Aerial Swarms
Learning Agility Adaptation for Flight in Clutter
Skater: 一种适应空中与多样地形的新型双模态双旋翼机器人
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
复杂环境下的编队飞行 (Formation Flight in Dense Environments)
【中配】非线性控制:哈密顿-雅可比-贝尔曼方程(HJB)与动态规划 - Steve Brunton
[轮足开源啦] 达妙开源轮足-轮足下楼梯
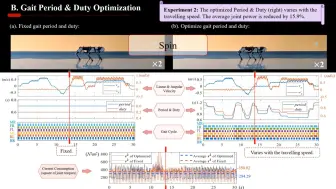
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
[SIGGRAPH Asia 2024] DualGS:基于双层高斯泼溅的体积视频人物渲染方法
浙江大学 FAST-Lab FAR 课题组2023代表性研究成果|无人机|人工智能|集群机器人|自主导航
[CVPR 2023] 在任何光照下随心所欲捕捉完美镜头!新3D人体数据集UltraStage Dataset
FACT: Fast and Active Coordinate Initialization for Vision-based Drone Swarms
[SIGGRAPH 2023] 揭秘ChatAvatar背后的参数化模型HACK: 数字人从未有过如此性感的脖子
无人机跟踪与飞落 (Adaptive Tracking and Perching for Quadrotor in Dynamic Scenarios)
开源了一个可以拯救普通狗子的代码
智能车漂亮学姐轻松发车拿下国一
高飞老师 “科学脱口秀”-----浙江大学2022年度十大学术进展
免税店,我们究竟占了谁的便宜?
[🏆SIGGRAPH2024最佳论文提名] 从文本生成服装板片!数字人终于有衣服穿了...
Active Collision-Based Navigation for Wheeled Robots
本来很想去 FAST Lab 的......
浙大最新 Science Robotics 微眼动启发的新型事件相机