V
主页
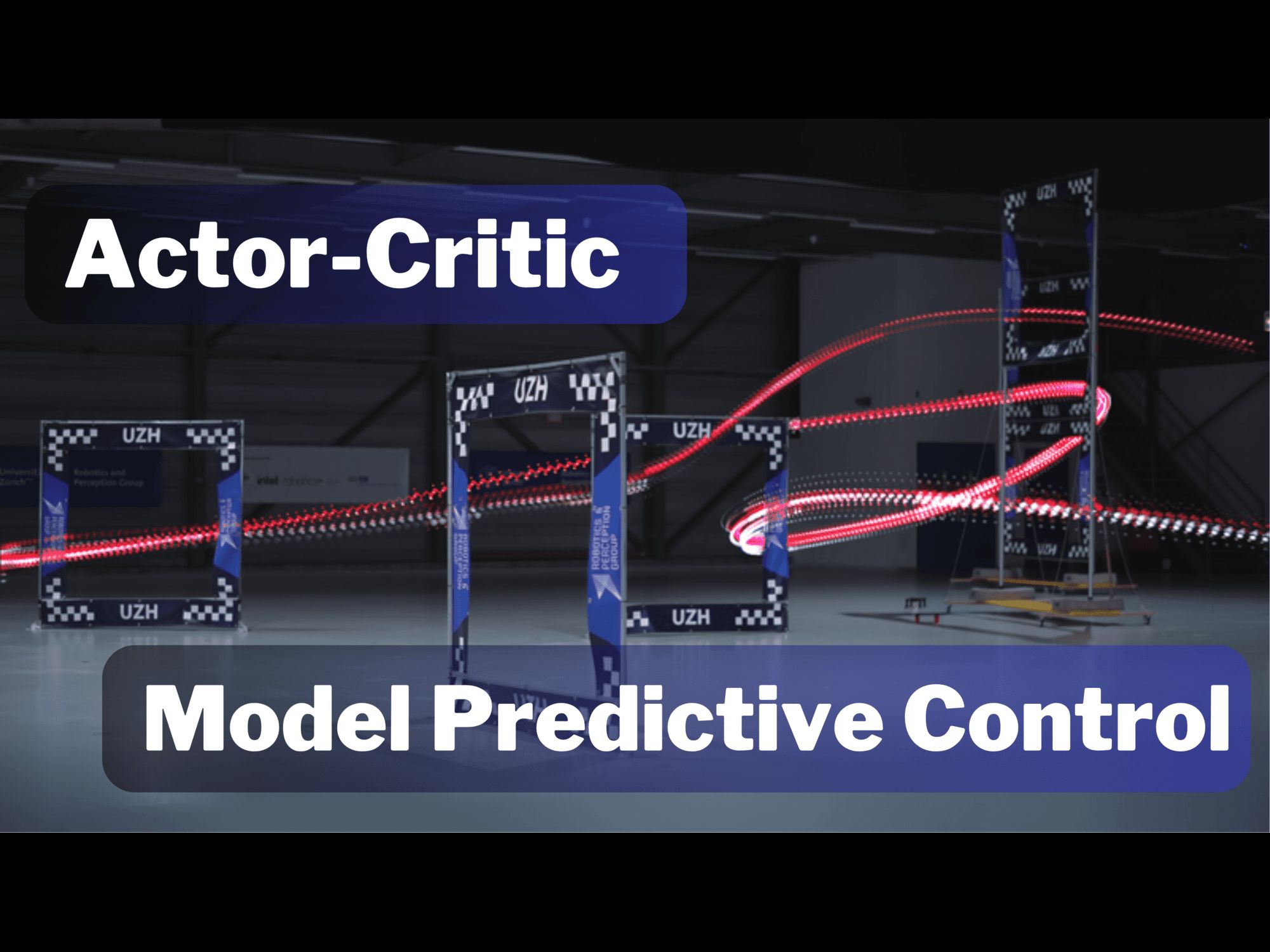
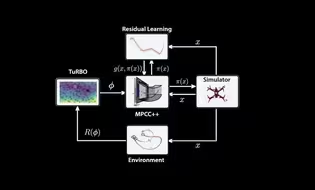
MPC + 强化学习![ICRA 2024] Actor Critic Model Predictive Control
发布人
An open research question in robotics is how to combine the benefits of model-free reinforcement learning (RL) - known for its strong task performance and flexibility in optimizing general reward formulations - with the robustness and online replanning capabilities of model predictive control (MPC). This paper provides an answer by introducing a new framework called Actor-Critic Model Predictive Control. The key idea is to embed a differentiable MPC within an actor-critic RL framework. The proposed approach leverages the short-term predictive optimization capabilities of MPC with the exploratory and end-to-end training properties of RL. The resulting policy effectively manages both short-term decisions through the MPC-based actor and long-term prediction via the critic network, unifying the benefits of both model-based control and end-to-end learning. We validate our method in both simulation and the real world with a quadcopter platform across various high-level tasks. We show that the proposed architecture can achieve real-time control performance, learn complex behaviors via trial and error, and retain the predictive properties of the MPC to better handle out of distribution behaviour. Reference: A. Romero, Y. Song, D. Scaramuzza, "Actor-Critic Model Predictive Control", IEEE International Conference on Robotics and Automation, 2024 PDF: https://rpg.ifi.uzh.ch/docs/ICRA24_Ro... For more info about our research on: Agile Drone Flight: http://rpg.ifi.uzh.ch/aggressive_flig... Drone Racing: http://rpg.ifi.uzh.ch/research_drone_... Machine Learning: http://rpg.ifi.uzh.ch/research_learni... Affiliations: A. Romero, Y. Song, and D. Scaramuzza are with the Robotics and Perception Group, Dep. of Informatics, University of Zurich, and Dep. of Neuroinformatics, University of Zurich and ETH Zurich, Switzerland http://rpg.ifi.uzh.ch/ Music Credits: scottholmesmusic.com under Free Creative Commons License
打开封面
下载高清视频
观看高清视频
视频下载器
翻遍整个B站!这绝对是2023年讲的最好的强化学习零基础入门到精通完整版教程(含实战源码)
机械臂强化学习抓取
混合网络攻击下基于强化学习的多机协同追击实验
经典内模估计+强化学习,四足机器人训练一小时,即可穿越任意地形
快被强化学习劝退了
DeepMind用强化学习具有具身智能的“足球机器人”,deepmind真的能另辟蹊径超越openai吗
(强推!) 2023春季CMU最新【最优控制与强化学习】全套教程,私立顶尖大学的水平!-人工智能/卡内基梅隆大学/16-745
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
强化学习第一步---换个模型玩
这可能是我见过强化学习和模型预测控制最好的教程!四大名校教授精讲动态系统和仿真、最优控制、策略梯度方法、MPC
(RSS'24) MPCC++:具有安全约束的时间最优飞行的模型预测轮廓控制
强化学习算法在12自由度双足机器人上初步实现行走
基于ROS2的自动驾驶决策规划系统--深度强化学习决策--Lattice规划--MPC控制
从模型预测控制到强化学习-3:Q-learning(上)
[Nature 23] 基于深度强化学习的冠军级别的无人机竞速
ViPlanner:用于局部导航的视觉语义学习 |ICRA 2024【苏黎世联邦理工学院&英伟达】
强化学习轮足机器人控制器
[RA-L 2024] 基于路径拓扑的全局探索规划
基于控制障碍函数与分层强化学习的无人机安全控制
23 Navigation in Crowded Environments using Learning based Convex MPC
高擎机电运动控制算法开源|强化学习篇
【Isaac Gym】四足&双足-强化学习训练效果
模型预测控制与强化学习—Model Predictive Control and Reinforcement Learning
【控制】模型预测控制 MPC 【合集】Model Predictive Control
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
从模型预测控制到强化学习-5:Q-learning(通透梳理版)
【强化学习训练走路的机器人】油管最强动画强化学习入门!不愧是MATLAB官方教程,行走机器人|深度学习|AI 人工智能
直接制霸天空!ICRA’24 最新基于强化学习的MPC算法,苏黎世大学出品!
深度学习无人机轨迹规划
强化学习控制,端到端,PPO算法,神经网络控制,SImulink可编程,PX4小无人机飞控,硬件在环仿真到实物飞行
《控制理论基础》:从ADRC到MPC
[1]强化学习玩王者荣耀_创建环境
基于多智能体强化学习的大规模无人机集群对抗
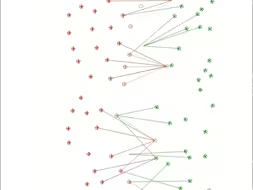
【ICRA 2024 | 机器人】基于学习方式利用混合密度网络的多模态运动规划
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
强化学习:当机器学习遇上控制理论(1)
MPC:控制的诗与远方
李沐-我们不知道为什么但是有用