V
主页
自动控制原理/根轨迹绘制方法
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
自动控制原理/复阻抗法求传递函数
大数据分析/四分位数计算/箱型图绘制
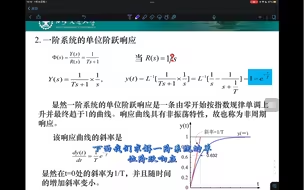
自动控制原理/一阶系统数学模型/阶跃响应/改善性能方法
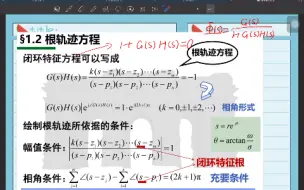
自动控制原理/相角条件/根轨迹
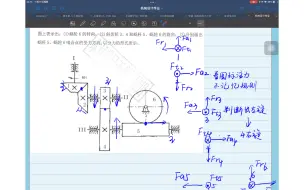
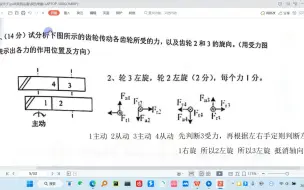
机械设计/齿轮受力方向判断/涡轮蜗杆受力方向判断
自动控制原理-考研-计算器的使用教学-计算超调量、特征根、根轨迹分离点、根轨迹出射角入射角、阻尼角、Bode图
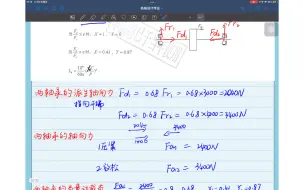
机械设计/轴承寿命计算总结
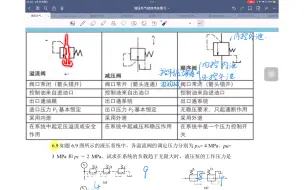
液压与气动技术 | 溢流阀 减压阀 顺序阀讲解
机器人学 l 7.3.2 笛卡尔空间中的轨迹规划
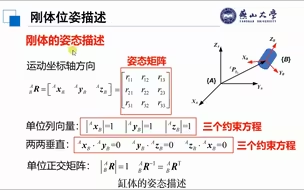
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
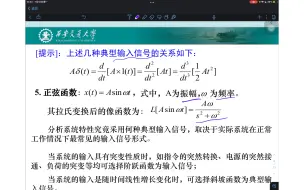
自动控制原理/正弦信号作用下的稳态误差怎么求?
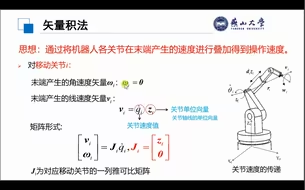
机器人学 l 3.6 速度雅可比矩阵的矢量积法
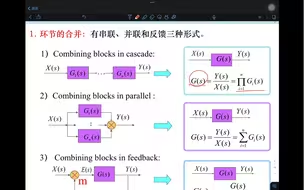
自动控制原理/闭环传递函数/方块图的等效变换/扰动输入/偏差输出/两级RC串联电路/
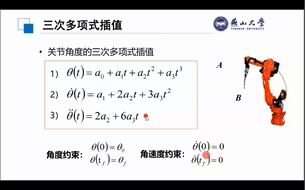
机器人学 l 7.2 轨迹规划中的三次多项式插值
因法庭支持做亲子鉴定,女方因此大骂法官(无码版)~离婚庭审
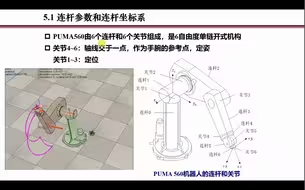
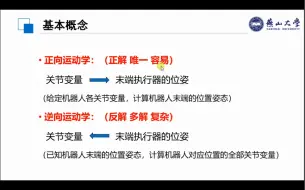
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
自动控制原理/伯德图绘制
机械设计/受横向载荷的螺栓组强度计算
频率特性/幅相特性曲线/对数频率特性
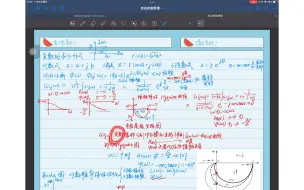
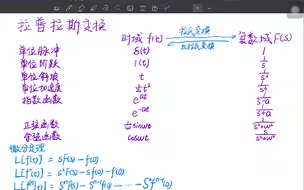
自动控制原理/传递函数/拉普拉斯变换/留数定理/复阻抗/典型环节
机器人学 l 7.3.1 笛卡尔空间的轨迹规划
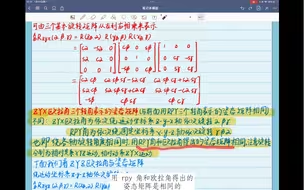
机器人学 l 2.5 姿态描述方法:RPY角和欧拉角
机器人学 l 7.1 机器人轨迹规划的相关概念
自动控制原理/二阶系统各参数求解/等效开环传递函数
机器人学 l 3.3机器人逆向运动学(以puma560为例)
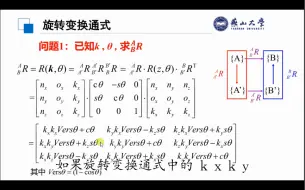
机器人学 l 2.6 旋转变换通式(等效转轴与等效转角)
自动控制原理/根轨迹绘制方法
基础4-23=步骤总结&常见零极点分布对应的根轨迹【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
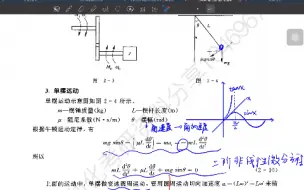
自动控制原理/非线性微分方程的线性化
自动控制原理/梅森公式/误差传递函数
机械设计/受预紧力和工作拉力的螺栓连接
自动控制原理/已知时域表达式 求复数域表达式
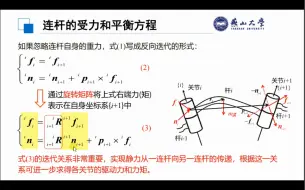
机器人学 l 3.7 连杆的受力与平衡方程
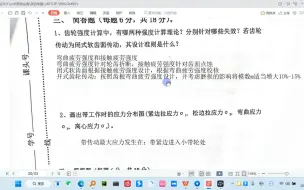
机械设计 | 简答题 1
自动控制原理/典型输入信号/常用性能指标/西安交通大学
机械设计 | 齿轮受力方向判断 | 齿轮旋向判断
被女友要求cos哥布林是什么感受?
液压与气动技术 l 液压基本回路习题讲解1-4
数值分析|习题讲解3|求解三对角方程组的追赶法
大数据分析/信息熵计算/信息增益