V
主页
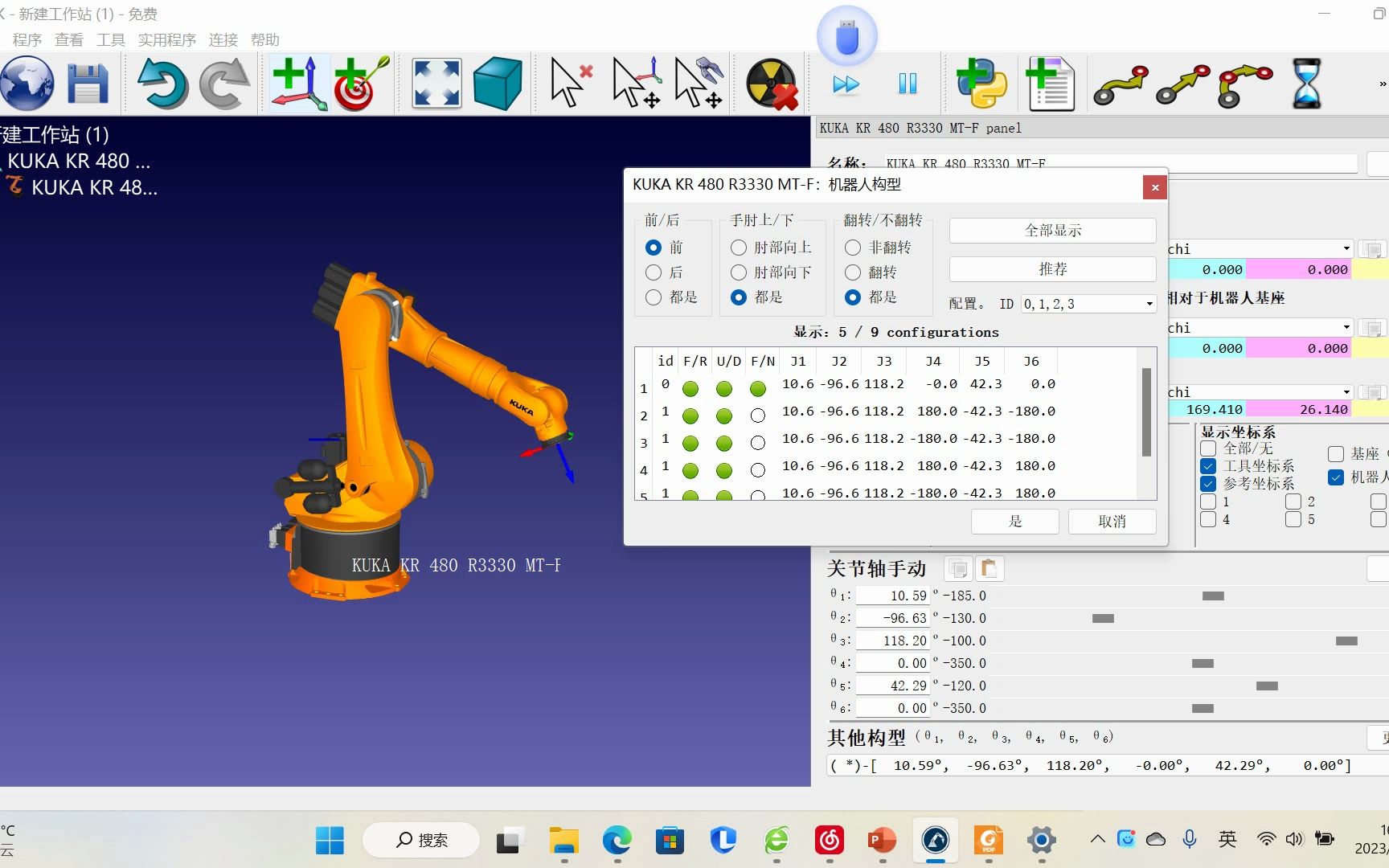
3.5 机器人逆运动学求解之关节位置状态
发布人
使用一个 3 位二进制状态量对机器人的关节转角进行约束,实现唯一封闭解的确定。
打开封面
下载高清视频
观看高清视频
视频下载器
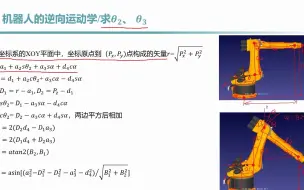
3.4库卡机器人逆向运动学推导
来看稚晖君的机器人了 智元机器人
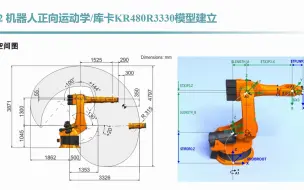
3.3 库卡机器人正运动学模型
盘点那些有趣的开源机械臂3
库卡可移动机器人
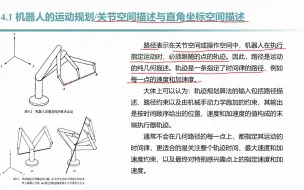
4.1机器人运动规划之关节空间描述和直角坐标系空间描述
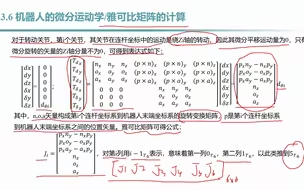
3.6 机器人微分运动学之雅可比矩阵(1)
1.1 机器人的基本概念与发展历程
Robot Studio变位机焊接
无抱闸自锁机器人关节电机
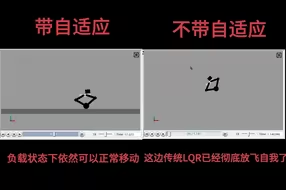
自适应LQR控制轮腿机器人Demo
【自研.关节电机】你应该跑不过高速跑15km的狗吧?
盘点那些有趣的开源机械臂2
机器臂开发。
机械臂启动,已经很稳不抖了哈哈哈
中国人形机器人发展现状!憋住不要笑!
盘点那些有趣的开源机械臂6
机器人中的减速机部件是不是最贵的?有没有减速机的老板科普下?
工业巡检机器人,具备机器视觉、激光扫描、红外热成像、声波分析和多种气体检测等功能,可替代人的视觉、嗅觉、听觉及温度感知,可对跑冒滴漏、异声异响、异味异热及时发现
凸轮机械手原理动画
运动控制与数字孪生
盘点那些有趣的开源机械臂5
发明咬人玩具的人真是个天才,它是如何做到纯机械随机触发的
3.10 雅可比矩阵的计算
迟早把这种可以加工铜铝的六轴机器人干到18500€…
SRS构型七自由度冗余机械臂运动学建模二:有效臂角区间求解
轮式双臂服务机器人的六关节机械臂拼到千元级了…
tesla人形机器人optimus2
凸轮机械手原理动画
高效同步机械臂助手。
只要你掌握了核心技术跟供应链,你就会发现四关节机器人的成本真的可以比立柱机械手更低…
机械臂码垛一下子(动作拖拽示教来的)
机器人下岗再就业
再见,机甲大师
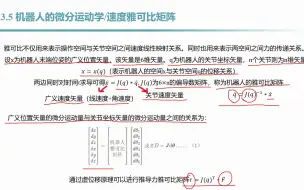
3.7 机器人微分运动学之速度雅可比矩阵(2)
工具坐标系、世界坐标系、基坐标系、关节坐标系...你都能分清吗??
机器人革命:智能机器时代终于到临了? #prorobots
19届全国大学生智能车总决赛~全国第一名
搞机器人自动化设备的兄弟如果觉得自己所从事的行业太卷,来看看缝纫机就会发现末端负载20公斤四轴全伺服的机器人整机13800还是太贵了…
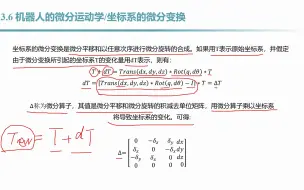
3.9 坐标系的微分运动与机器人手的微分运动