V
主页
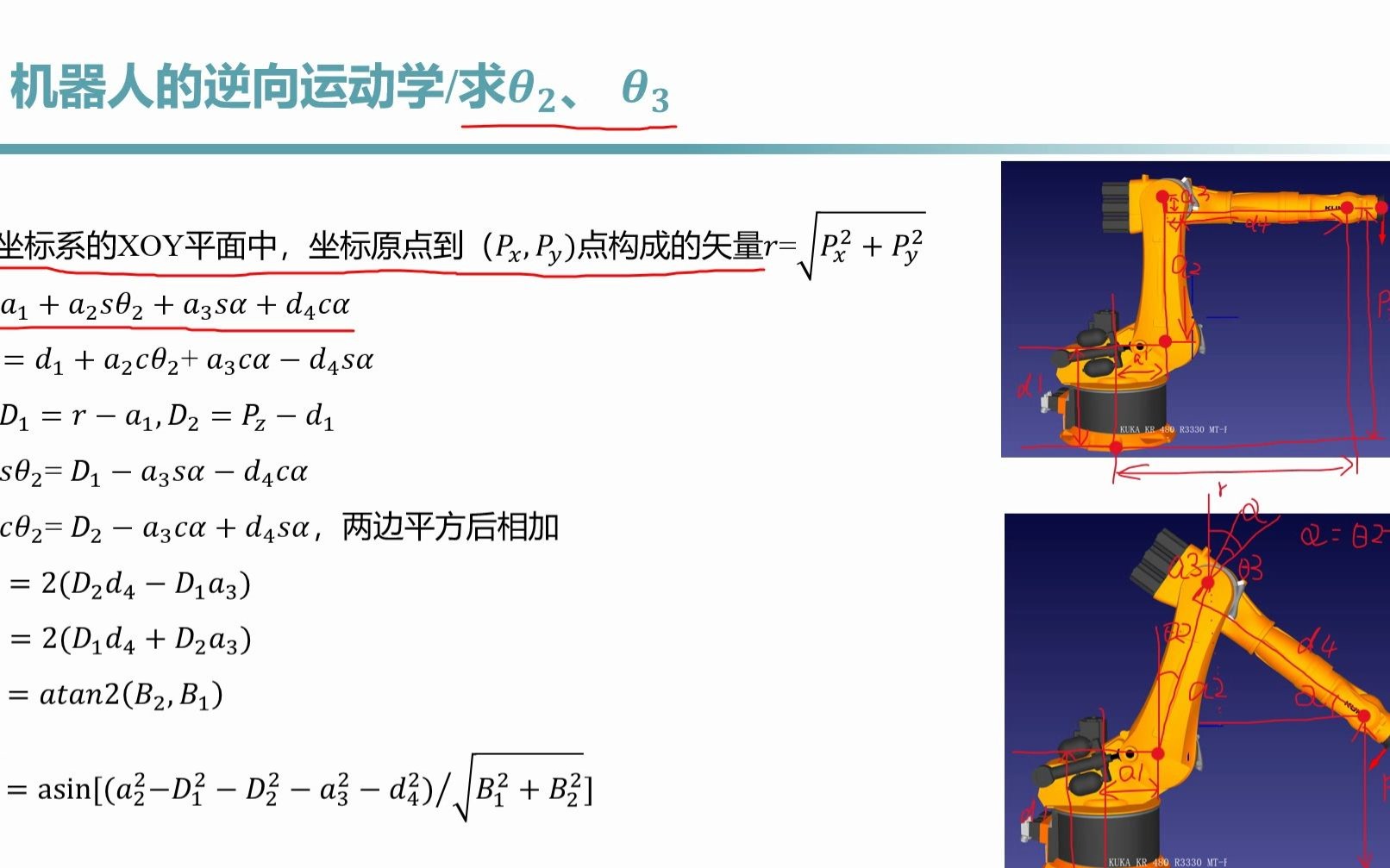
3.4库卡机器人逆向运动学推导
发布人
把逆运动学的全部求解方法分成两大类: 封闭解法和数值解法。由于数值解法的迭代性质, 其求解速度一般比相应的封闭解法慢很多。所有包含转动关节和平动关节的串联型6 自由度机器人均是可解的。 但是这种解一般都是数值解, 对于6 自由度机器人来说, 只有在特殊情况下才有解析解。研究表明, 具有6 个旋转关节的机器人存在封闭解的充分条件是相邻的三个关节轴线相交于一点。
打开封面
下载高清视频
观看高清视频
视频下载器
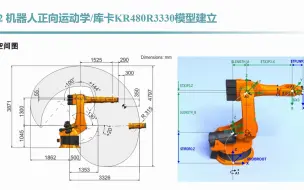
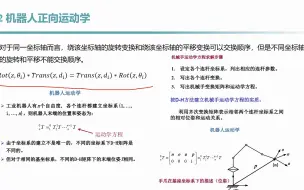
3.3 库卡机器人正运动学模型
3.2 机器人DH参数表达法
3.5 机器人逆运动学求解之关节位置状态
波士顿动力:基于运动学,力,视觉信息融合实现物体状态估计
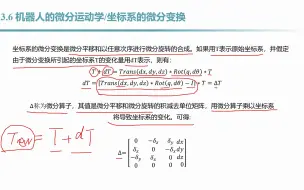
3.9 坐标系的微分运动与机器人手的微分运动
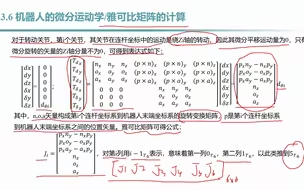
3.10 雅可比矩阵的计算
上位机控制ABB机器人运动robot studio实现(可控制实际)
震惊 机器人可能有了想法 现在的机器人到底发展到什么程度了,中国的机器人行业怎么样,
【机器人之梦】高清完整
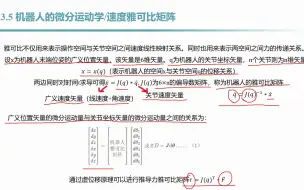
3.7 机器人微分运动学之速度雅可比矩阵(2)
人形机器人最难做的本体零件行星滚柱丝杠,一文讲透行星滚柱丝杠
【工业机器人】 Robotic System在新行业领域应用
学习清华对产品的要求未来将以的清华标准对待每一款产品#自主研发,远程视频回传,实时操控,远程转移危险物品,代替人员执行危险作业#无人车远程控制#远程排爆机器人
三菱FX5UPLC和机器人通讯控制机器人动作
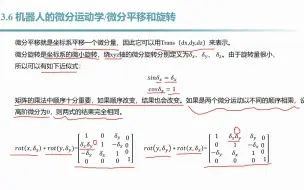
3.8 坐标系微分运动之微分平移和微分旋转
VEX-IQ机器人 滑膛炮细节,阻拦索是不是很帅~
从0开始制作机械臂---3 SCARA臂展示
大族焊接机器人新玩法,配合地轨,管得更宽了
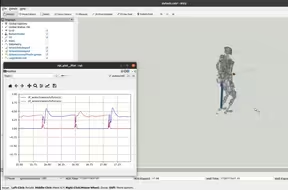
OpenLoong状态估计之基于接触和运动学的LegOdom
一般工业场景用的机械臂,不管是立柱机械手,还是四轴六轴机器人,还是六关节机器人,还是协作机器人,我们都有掀桌子的能力了…
1.1 机器人的基本概念与发展历程
Factory IO官方宣传视频
【赛博日报】跑的最快的人形机器人
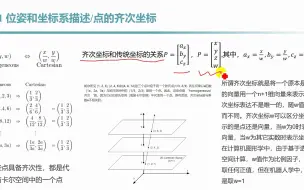
2.1 点的齐次坐标
机器人超级工厂, 整个汽车厂都是机器人在生产汽车……
马斯克确认Tesla Optimus Gen 2的生产价格为1万美元!
机器人的重复定位精度和绝对定位精度的区别
三轴与机械臂
常见六轴机器人的六轴指哪些?
仿真眼球-solidworks运动仿真-keyshot渲染
一个号称掌握工业机器人运动控制核心的家伙居然恬不知耻的卖999的三公斤小四轴机器人的机构件,也就是在卖铁…
库卡与ABB机器人测试
德国进口机器人上的平垫圈为什么又厚又大?
车间连续辞职了好几个员工···
【高中物理】【可视化模拟】怎样将物体扔得最远(初速度恒定)【抛体运动】
跟你说一件事儿,机器人已经开始生产自己了!
VEX IQ风驰电掣,自动调节距离的机器人V3.2版,无论距离远近,自动计算,一键生成,百发百中,弹无虚发,上下球门都可。
机器人DH参数建模助手-实时显示模型变化-matlab+RTB
【大牛站长】更新啦,赶紧来围观吧!
2024全球十大人形机器人:中国机器人强势崛起!