V
主页
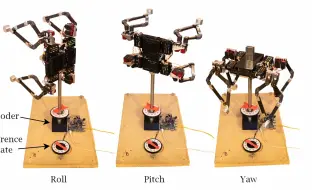
四足机器人的极限地形穿越|2023【卡内基梅隆大学】
发布人
论文:Yang, Yanhao, Joseph Norby, Justin K. Yim, and Aaron M. Johnson. "Proprioception and Tail Control Enable Extreme Terrain Traversal by Quadruped Robots." arXiv preprint arXiv:2303.04781 (2023). 链接:https://arxiv.org/abs/2303.04781 lab:https://www.cmu.edu/me/robomechanicslab/
打开封面
下载高清视频
观看高清视频
视频下载器
谷歌AutoRT:具身智能大模型机器人大型编队|2023【Google Deepmind】
Moco12缩比MIT Mini Cheetha的8自由度四足机器人3D数模图纸
六足攀爬机器人|2019【日本法政大学】
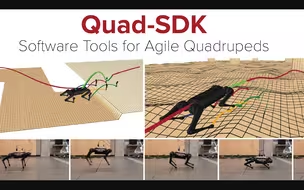
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
FluidLab:复杂流体操作|2023【卡耐基梅隆大学】
四足机器人跌落姿态调整 基于强化学习的机器人控制
波浪式游泳机器人:两波机制|2023【以色列本古里安大学】
使用运动约束强化学习的四足机器人
超雄机器人
四足机器人萌宠,手把手教教你制作,资料开源!!!
你是否好奇过,心脏为什么可以一直不停的跳动呢?
四足机器人+机械臂
在可变形地形上学习四足运动|2023|Science Robotics【韩国科学技术院】
特斯拉人形机器人Optimus:先做五个机器人试试|2023【特斯拉】
电液肌肉单腿机器人 灵活的腿 轻巧的腿
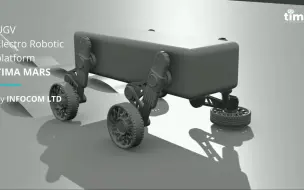
轮足机器人|2021|TIMA【乌克兰】
具有平面规律的单目视觉惯性里程计|2023【特拉华大学】
OPT-Mimic:模拟动态四足动物行为的优化轨迹|ICRA 2023【不列颠哥伦比亚大学】
3D打印机器人执行器组件,在这个视频中,我展示了为我的四足机器人设计的机器人执行器的完整组装
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
开源图像分割Segment Anything Model|2023【MetaAI】
ICRA2023 自主四足机器人挑战赛|2023【DREAM STEP KAIST】
蜡像Ai空姐机器人
开源LEAP Hand: 低成本、高效、仿人的机器人手学习|2023 RSS【卡耐基梅隆大学】
四足机器人运动的神经场景表征|2022【苏黎世联邦理工学院】
抓手机、透明试管、气球|指尖接近传感器机器人抓取|2021【日本大阪大学】
遥操作机器人Astra|2023【apptronik】
环形软舞机器人|2022【北卡罗来纳州立大学】
IsaacLab实现四足机器人AMP,视频训了1000轮,开源链接在简介
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
单腿跳跃机器人RAMIEL|2022【東京大学】
【中文注解】波士顿动力四足机器人Spot推出了声振检测和现实捕捉的新功能|2024.09.24
机器人大语言模型综合技能学习:从语言到奖励|2023【Google】
双足机器人在不平坦垫脚石上的动态行走|2023【南加州大学】
蛇形激光机器人lasersnake2|2017【OCRobotics】
开源人形机器人Hector:人形运动操纵控制|2023【南加州大学】
拓扑语义图存储器 |CoRL 2022【首尔国立大学】
异构机器人团队的能量感知、无碰撞信息收集|TRO 2023【MIT】
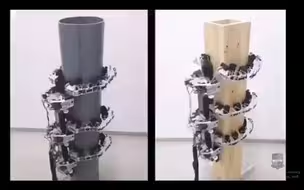
管道攀爬机器人:RSTAR|2022【Ben-Gurion University of the Negev】
无人机学习在空中用机械手开门|2023【苏黎世联邦理工学院】