V
主页
京东 11.11 红包
四足机器人运动的神经场景表征|2022【苏黎世联邦理工学院】
发布人
四足机器人运动的神经场景表征 Neural Scene Representation for Locomotion on Structured Terrain, David Hoeller, Nikita Rudin, Christopher Choy, Animashree Anandkumar, and Marco Hutter, 2022, RA-L/IROS 2022 Paper: https://arxiv.org/abs/2206.08077
打开封面
下载高清视频
观看高清视频
视频下载器
ANYexo 2.0:穿着全驱动外骨骼机器人的日常生活|2022【苏黎世联邦理工】
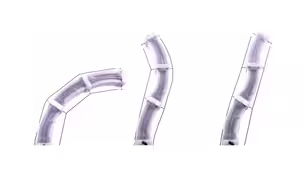
BIOIC线驱软连续机器人|2022【德国弗劳恩霍夫研究所】
可穿戴肌肉Myoshirt:上肢日常生活辅助|2022【苏黎世联邦理工学院】
自然智能:机器人监测栖息地|2022【苏黎世联邦理工】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
两轮跳跃机器人「Ascento」2020【苏黎世联邦理工学院】
开源动力机器人倡议:四足机器人Solo和双足机器人Bolt|2022【纽约大学&马普所&苏黎世联邦理工】
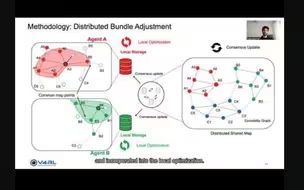
分散式协作SLAM|ICRA 2023【苏黎世联邦理工学院】
神经步态:学习双足运动|2022【加州理工Caltech】
SELDA驱动的机器人腿跳跃|2022【IROS】
Tesla AI Day 2022:人形机器人Optimus部分
人工智能学习海洋中水下航行|2021|Nature Communications【加州理工学院Caltech】
软机器蛇实时仿真|2019【伍斯特理工学院】
农业采摘机器人|2023|Floating Robotics【苏黎世联邦理工学院】
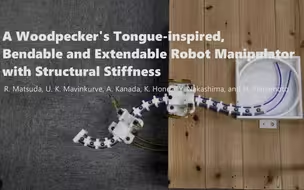
啄木鸟启发的机械手|2022【日本九州大学】
学习猴子在树上荡来荡去|2022【英属哥伦比亚大学】
Co-SLAM:神经实时 SLAM 的联合坐标和稀疏参数编码|cvpr 2023【UCL】
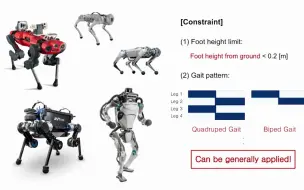
腿式机器人运动:不仅有奖励,还有约束|2023【韩国KAIST】
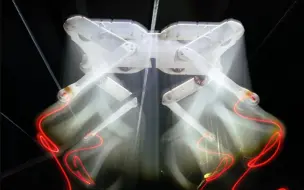
仿生蜜蜂BionicBee|2024【Festo】
【波士顿动力】中文字幕|米其林工厂的Spot
OpenBot:将智能手机变成机器人|2022【Intel OpenBot】
泡泡造软体机器人|2021【Nature】
少发一个。熟人别刷到我
通用机器人导航模型|2023|Sergey Levine【机器人讲座】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
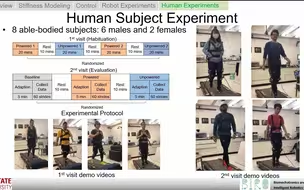
轻量膝关节外骨骼|2022【TRO】
栖息的类鸟机器人|2021|斯坦福大学【Science Robotics】
关节顺应性对仿生蹄动态防滑性的意义|2019|帝国理工学院【T-RO】
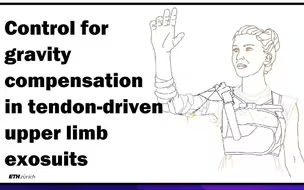
用于外骨骼的人机连接系统|2023【苏黎世联邦理工学院】
Zip-NeRF:基于网格的抗锯齿神经辐射场|2023【Google】
现代即插即用机器人模块|CES 2022【韩国现代】
iCub 3遥操作-虚拟形象系统|2022【IIT】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
人工智能和机器人揭开了苍蝇翅膀运动的控制机制|2024|Nature【加州理工】
RCareWorld:护理机器人模拟世界|2022【康奈尔大学】
手掌大小的全向移动机器人|2022【日本丰桥工业大学】
了解机器人的工作空间|2021【Lesics】
幽灵公主阿席达卡座骑四足机器人-亚克路|2022东京国际机器人展【日本川崎重工業】
自然多接触步行|2022|RA-L【Caltech】
ViNT:视觉导航大模型|2023【加州大学伯克利分校】