V
主页
CORL 2024,可微分仿真学习四足机器人运动
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
浙大刘勇教授指导团队在IROS 2024四足机器人挑战赛上荣获冠军
敏捷自适应四足机器人的分层优化控制
强化学习四足机器人三
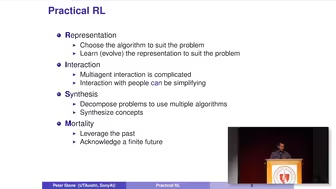
[RLC 2024] Peter Stone,实用强化学习:30 年研究的经验教训
2024 IROS QRC(四足机器人挑战赛)浙大机器人队自主导航运动
从物理系统中学习的欧几里得神经网络E(3)NN
通用机器人路径思考:scaling law、数据飞轮和具身智能
3DV 2024,下一代reconstruction
机器人中的数值方法
高分辨率触觉感知在反应式机器人操作中的应用
【波士顿动力】中文字幕|米其林工厂的Spot
[CoRL2023] OOD Workshop: 如何在分布之外泛化机器人
SynH2R:合成的手-物体运动以学习人机间物体传递
四足机器人ROS PID控制原理讲解
下一代机器人感知:3D场景图,可验证算法,自监督学习
宇树狗儿 新增功能〖跳跃跑〗
RSS2024:用于基于语言机器人导航的层级开放词汇 3D 场景图
LLM与ROS(机器人操作系统)
Real World Robotics Tutorial3:识别机器人的运动学和动力学
通过学习规划和感知进行任务和运动规划
神经场在机器人操作中的应用
通过扩散策略进行机器人灵活操作
利用结构实现高效灵活的机器人接触操作
机器人空间感知基础
多机器人协作感知数据集
从物理互动中学习结构化世界模型
成本低廉 | 软硬件开源机器猫 CaT | 四足机器人 | 人工智能机器人 | 开源机器人 | 机器狗
向着大型行为模型发展:通过监督学习实现多功能和灵巧的机器人
基于优化的敏捷足式机器人控制与规划
机器人学习中的收缩理论
慢放详解 舵机3D打印人形机械手
分享之前录的一个视频:用手柄控制四足机器人
右边两足走路也是双足行走
强化学习魅力时刻
Svan M2: 用于机器人和人工智能研究的四足研究平台
GPT-4V应用于机器人视觉语言规划
2天学会,仿人自然行走
ICRA2024 LHMP研讨会:Isn't Motion Prediction just Model-based RL?
复杂环境中的机器人运动