V
主页
2.5.3_参数服务_C++实现_03客户端_02查
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3.1.4_分布式_小结
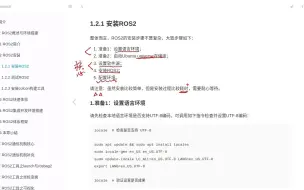
1.2.1_ROS2安装_步骤1设置编码
1.3.4_ROS2快速体验_运行优化
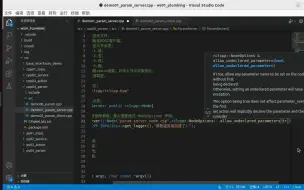
2.5.3_参数服务_C++实现_02服务端_02增
5.1.1_坐标变换_案例安装以及运行
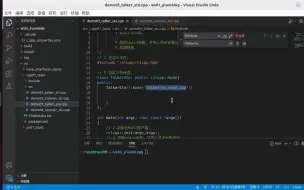
4.2.5_launch之Python实现_分组设置
5.3.9_坐标点发布_Python实现
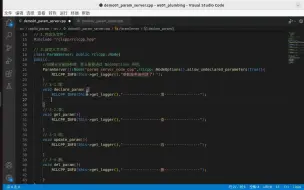
2.5.3_参数服务_C++实现_01框架搭建
2.2.6_话题通信_自定义接口消息(Python)_01框架搭建
《ROS 2机器人开发从入门到实践》7.4.4使用接口完成路点导航
1.5.1_ROS2体系框架_文件系统_05常用命令
3.6.3_时间相关API_Duration
2.5.3_参数服务_C++实现_02服务端_01代码框架
2.2.5_话题通信_自定义接口消息(C++)_01框架搭建
6.4.5_URDF工具
2.2.2_话题通信_原生消息(C++)_01发布方02框架搭建
2.3.5_服务通信_小结
2.2.0_话题通信_场景、概念、作用与消息接口
2.5.3_参数服务_C++实现_03客户端_03改
5.3.0_坐标变换广播_引言
1.5.4_ROS2体系框架_应用方向
6.5.1_URDF优化_xacro_快速体验
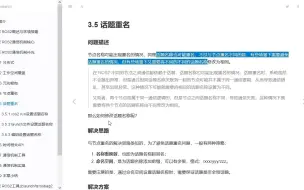
3.5.0_话题重名_问腿、解决思路以及解决方案
4.4.2_rosbag2_编码实现(C++)_01案例源码分析
1.5.1_ROS2体系框架_文件系统_03编码之初始化与资源释放
2.4.3_动作通信_C++实现_03客户端_04目标响应
《ROS 2机器人开发从入门到实践》7.5.3.1添加语音播报功能(上)
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
3.8.4_期中大作业_服务通信_实现_01流程简介
6.4.2_URDF语法02_link_02使用补充
4.4.3_rosbag2_编码实现(C++)_02框架搭建
1.1.2_ROS2简介_ROS2组成体系
5.3.4_静态广播器_Python实现01_框架搭建
5.3.8_坐标点发布_C++实现
1.2.1_ROS2安装_步骤2启动universe存储库
1.4.1_集成开发环境搭建_VSCode_03includepath配置
1.5.2_ROS2体系框架_核心模块_02工具相关
5.3.3_静态广播器_C++实现01_流程简介
4.4.5_launch与rosbag2_总结
5.6.2_乌龟跟随(C++)_02生成乌龟中