V
主页
4D点云毫米波雷达slam
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
用FAST_LIO2算法跑一下录制的CJLU校园数据集
加速道路资产盘点,灵光Lixel助力交通管理智能化| 手持激光雷达
vins不知道怎么调了,飘的一批
CEIC2024|西安电子科技大学杜兰:物理可解释的雷达目标特征提取
灵光Lixel L2,助力全球最长在建海底公路隧道项目
小白机器人相机+雷达做目标检测和跟踪测试
什么是SLAM?一个小时即可带你入门,从理论到实战,不到五个小时就能搞定,跟着大佬一起嗑代码,太上头了!—视觉slam、计算机视觉、视觉slam实战、自动驾驶
终于画出来咯
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
ROS中的目标检测与ORBSLAM结合
DPVO testing 0482
轻量级道路特征地图(开源了)
Experiment: LIO+wheelspeed tightly coupled隧道测试
最近完成的室内外SLAM+GPS鲁棒性验证实验。效果和稳定性很不错。
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(下)
与SLAM实验车合影,留念一下并肩战斗的伙伴
满分旗舰!复合型导航机器人强势登场,室内外建图与导航定位专家!
SLAM系列之Fast Livo复现(五)
SLAM系列之Fast Livo复现(四)
地库3D车道线重建 (3D Lane Line Reconstruction in Parking Scenario)
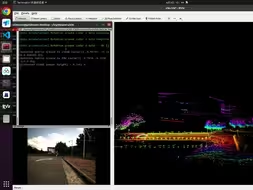
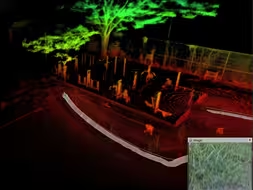
【激光SLAM专题】LOAM如何运行
GRIL-Calib:自由度不足时的的IMU-LiDAR外参标定。
将SLAM推向全天候环境!CVPR'24:SubT-MRS Dataset
地面重建测试 | DLIO+UFOMap
多无人平台协同SLAM实车实验
被吹上天的5G为何突然销声匿迹?
这下好了,真赛博调车
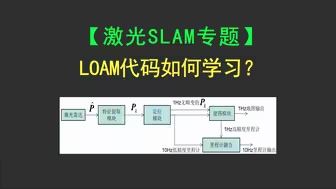
【激光SLAM专题】LOAM代码如何学习
基于ROS2的SLAM自主导航功能的实现
揭秘“神秘怪客”:竟能屠杀千只鲨鱼,钻心、吞脑令人震惊!
美航天局长:我怕中国人抢先登月,更怕他们上去就说“自古以来”
老高和小茉介绍张祥前的视频火了
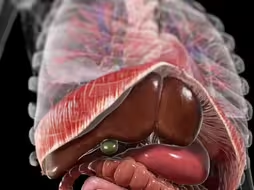
人体透视|身体内部运动无处不在
鼓膜的直径约为8-10毫米,厚度仅约0.1毫米,所以鼓膜是十分脆弱的
【激光SLAM专题】LOAM原理通俗易懂
嫦娥六号带回1935.3克月球样品!
【嫦娥6号成功开箱】YouTube外语翻译,看到各国惊叹的评论,才深刻意识到这真的是一件非常牛逼的事情!
这是实验室在农场杂交培育的各种奇怪生物。