V
主页
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
发布人
论文链接:https://arxiv.org/pdf/2405.10743 本文提出了一种基于优化的SLAM方法,通过使用2D激光扫描(和里程计)信息同时优化机器人轨迹和占用地图。其关键创新之处在于,机器人姿态和占用地图被同时优化,这与现有的占据地图策略显著不同,后者需要先获取机器人姿态,然后才能估计地图。在公式化中,地图被表示为一个连续的占用地图,环境中的每个2D点都有相应的证据值。Occupancy-SLAM问题被表述为一个优化问题,其中变量包括所有机器人姿态和在选定的离散网格单元节点上的占用值。 提出了一种改进的高斯-牛顿方法来解决这个新的问题形式,同时获取优化的占用地图和机器人轨迹以及它们的不确定性。由于算法基于批处理优化且涉及的变量数量较大,因此它是一种离线方法。使用仿真和公开可用的实际2D激光数据集进行评估表明,当我们的算法提供了相对准确的初始猜测时,所提出的方法可以比现有技术更准确地估计地图和机器人轨迹。
打开封面
下载高清视频
观看高清视频
视频下载器
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
特斯拉的World Model是什么?怎么做端到端训练?
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
最近一个月,Occupancy领域有哪些值得关注的工作?
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
分类突破!自动驾驶中的Occupancy感知方法分类
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
多传感器融合!BEV感知融合算法介绍
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
使用概率深度补全的3D激光雷达重建(IROS2022)
端到端算法是什么?自动驾驶领域是怎么做的?
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
什么是端到端自动驾驶?什么是基础world model?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
不再依赖RGB-D!NICER-SLAM:一个密集的RGB SLAM系统
PLUTO算法详解:端到端首次超越基于规则的方法
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
高精地图制作关键技术及领域主流方案分享-part1
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
视觉SLAM进阶-从零开始手写VIO
马斯克特斯拉机器人的最新视频和技术解析
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
NeRF如何监督Occupancy Networks?
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
搞懂了!原来激光雷达和相机的内外参是这样标定的
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
8. SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
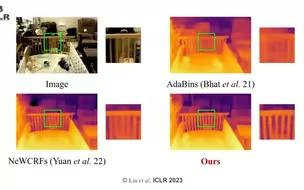
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM