V
主页
京东 11.11 红包
Raspberry Pi树莓派ROS+RGBD+SLAM小车首show
发布人
入一行,爱一行,爱就要有投入。Raspberry Pi树莓派ROS+RGBD+SLAM小车首show。后面会陆续出一些ROS相关开发视频,希望能帮到你。抱团取暖,共同远航。
打开封面
下载高清视频
观看高清视频
视频下载器
SLAM为什么需要IMU
PoE+ NVMe 抢在 Raspberry Pi 之前一击必杀
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
How to Map with LiDAR - using a Raspberry Pi Zero 2W- RPLidar and Rviz
听劝不要轻易入坑SLAM
北邮大三创新实验项目--六足搜救机器人(基本动作+上下台阶)
北邮大三创新实验项目--六足搜救机器人(体感遥控+pc界面遥控+mpu6050直行修正)
马斯克特斯拉机器人的最新视频和技术解析
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
ROS 路径规划控制
这算ros小车????
树莓派新品 Raspberry Pi AI 摄像头 - 5 分钟内完成评测、设置、测试
轮式里程计激光里程计视觉里程计区别是什么
deepin23在树莓派5(Raspberry Pi 5)上的运行实录2
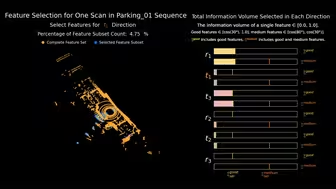
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
树莓派5 使用52Pi的Armor Case并且启用NVME磁盘存储是什么体验?
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
A Compact LiDAR Odometry and Mapping with Dynamic Removal
兄弟们,终于有树莓派了!
多传感器融合SLAM松耦合与紧耦合
【开源教程】ROS+PX4开源机械臂控制(上)
OrangePi 5 Plus性能测试:1080P/4K下的视频播放、测量功耗
SLAM系统的2种设计范式
SLAM-Viewer,SLAM便捷可视化小工具
LLaMa 3.2 - 1B 在树莓派 5 使用ollama部署调用
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
VINS算法视觉惯导融合SLAM
为什么需要多传感器融合
NVIDIA Isaac ROS 3.0:重塑机器人未来
Fast LIVO 硬同步过程释疑
铰接式车辆的运动规划
ROS小车自动转圈
ChainSLAM实时建图演示
【CGSAI】SLAM Zero to One
【教程】"我造了一个球平衡机器人"【开源】
机器人多传感器融合
【Orange Pi系列教程】Ubuntu Xfce桌面系统使用:以太网口测试
【OrangePi 系列教程】Linux镜像编译脚本的使用:制作压缩扩容镜像的方法
SLAM算法为什么需要内存管理机制