V
主页
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ETH提出基于学习的四足机器人爬梯子控制方法 | 附论文
总算是在过年前完成了四足机器人MPC!
也是玩上ROS了
使用离散卡尔曼滤波对四足机器人进行状态估计
就说这线找的稳不稳吧(第二季)
四足机器人VMC+状态估计完成!开始下一征程!!!
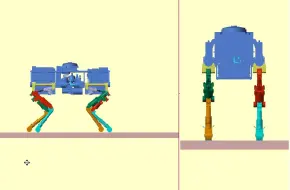
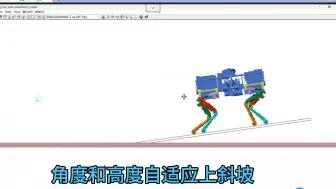
四足机器人MPC爬坡
大族机械臂SDK运动控制
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
simulink四足机器人mpc+wbc操作记录:使用两种不同的方式进行质心规划
ROS控制 | 第一轮导航代码讲解
ROS机器人室内目标自动搜索,自主导航。
生产力大PK!!!——同时跑四足机器人vmc代码
纯自学ROS,改装小车手搓RGB相机云台
自制ros建图导航机器人2
【中文注解】波士顿动力四足机器人Spot推出了声振检测和现实捕捉的新功能|2024.09.24
Isaacsim/IsaacLab中URDF-USD模型转换,碰撞体查看与修复
四足机器人分离式力位混合控制方法
ROS控制 | 第一轮控制功能包讲解
Matlab玩家狂喜!!!纵享丝滑~
一阶倒立摆LQR, MPC控制,Python, C++源码公开, Gazebo仿真
【日常调试】Autoware上车调试的日常,线下课程筹备中
能刷ROS系统的路由器都是违法的吗?
机器人竞赛基础技术讲解(2)-9月18日
深夜录制,软路由ROS使用脚本自动获取并更新IP地址
画了一个机器人ROS开发板
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
我回来了-软路由RouterOS防火墙规则之“流量转发指定接口”
3D打印机器人执行器组件,在这个视频中,我展示了为我的四足机器人设计的机器人执行器的完整组装
室外ROS 深夜调车,一鼓作寄
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
十年了!winbox终于支持原生MacOS啦!一起来看4.0有哪些变化
路边捡回来的狗子不老实于是调教了一番
五子棋机械臂 人机对战 法奥FR3 ROS教育机器人 数字孪生
使用运动约束强化学习的四足机器人
分享几个ROS简单的脚本
Qt 多线程案例,企业级案例展示,真的没有那么难
用DQN强化学习训练玩一下倒立摆控制
新电脑开机!
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄