V
主页
京东 11.11 红包
反光柱SLAM
发布人
应需求加的反光板建图定位
打开封面
下载高清视频
观看高清视频
视频下载器
自己搭建平台跑通GICI-LIB
特殊场景算法改进
点云动态物体过滤
hesai激光测试
激光imu slam和激光imu轮速融合slam对比
【海克斯康RealSLAM10】即刻探索三维世界
ChainSLAM实时建图演示
自搭建平台gici-open RTK-RRR模式
点云动态物体过滤实时效果
GICI树底测试
【SLAM】【VIO】双目视觉+超强三维感知力【应用场景——搭载在地铁列车上】“实测”
SLAM着色点云精细建模园林石雕!
赛尔最近出了一款风声很大的手持激光扫描仪,今天我们一起测试下赛尔SLAM S10的RTK精度如何吧?#三维激光扫描仪 #SLAM
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
DOM-60 为机器人带来前所未有的感知能力
Fast LIVO 硬同步过程释疑
gici夜晚仅imu无相机模式
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
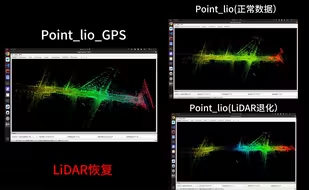
Point_lio_gps解决LiDAR退化导致的里程计漂移。
SLAM为什么需要闭环检测
SLAM-Viewer,SLAM便捷可视化小工具
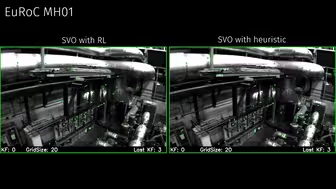
强化学习给视觉里程计自适应调参
除了激光SLAM和视觉SLAM还有哪些研究方向
GS-LIVOM (Environment Guideline)
华山区大范围激光视觉惯性SLAM建图
听劝不要轻易入坑SLAM
SLAM着色点云模型三维重建!
机器人多传感器融合
套件教程-Point LIO介绍与使用
多传感器融合算法落地改进建议
2、MetaCam EDU 产品功能及细节介绍
为什么需要多传感器融合
SLAM为什么需要IMU
【华南农业大学】激光视觉惯性SLAM建图 - 经济管理学院院楼
【华南农业大学】激光视觉惯性SLAM建图 - 农业工程楼
赛博仙女棒研发成功
帧间里程计运动估计
第25讲:Egoplanner集群仿真
mid360测试
隧道里面抡摆锤,暴力SLAM测试!