V
主页
套件教程-Point LIO介绍与使用
发布人
Point-LIO 可以应用于各种自主任务,如轨迹规划、控制和感知,特别是在涉及非常快的自主运动 (例如,在严重振动和高角速度或线速度情况下)或需要高速里程计输出和建图(例如,用于高频反馈控制和感知)的场景中。此次教程我们来学习一下该框架 教程地址:https://gitee.com/gwmunan/ros2/wikis/pages
打开封面
下载高清视频
观看高清视频
视频下载器
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
SLAM系列之Fast Livo复现(四)
SLAM系列之Fast Livo复现(一)
套件教程-FAST LIO2之点云建图
ROS2之SLAM介绍和技术选型
套件课程--LIO-SAM的介绍和使用
ROS2之Navigation2的介绍和入门
Swarm-LIO2: 适用于无人机集群的分布式、高效激光雷达惯性里程计
SLAM系列之Fast Livo复现(二)
大疆livox-mid360定位
SLAM系列之Fast Livo复现(五)
SLAM系列之Fast Livo复现(三)
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
ORB-SLAM3有必要学吗
End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
手工制作-自制Mid360数据线
视觉SLAM的本质多视图几何
ROS2之RTABMap双目建图与导航
ROS2之导航参数调优
基于3D GS的SLAM
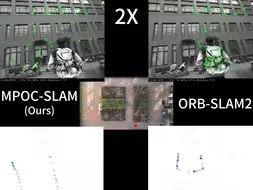
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
ROS2实战之RosBridge
大疆livox-mid360室外定位
ROS2之多传感器融合包Robot-Localization的使用
ROS2之PCL库的使用
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
ROS2之运动学模型选型
手把手学ROS2 Humble
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
搞SLAM算法为什么要学李群和李代数
ROS机器人基于gmapping的slam自动导航建图!
无人机室内自主飞行,和地面站操作
港科大沈邵劼团队开源! 自适应交互模态探索的多模态集成预测和决策
TC2LI-SLAM: A Tightly-Coupled Camera-LiDAR-Inertial SLAM System
1、MetaCam EDU产品介绍及展示!让研发之路,畅通无阻!
Pixhawk与ROS强强联合,打造更强的地面小车!
SLAM100旅游景点三维建模,10分钟测完石头王国——夜郎谷,不规则造型,三维立体建模,简单易上手,大大减少了外业工作量。
Navigation2:基础论文导读