V
主页
京东 11.11 红包
复杂非线性约束的多目标优化设计-以三自由度球面并联机构为例
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
MATLAB实现3rpr平面并联机构的几何逆解
并联机器人仿真、分析与设计入门,MATLAB在机器人仿真设计中的应用,以平面五连杆机构为例的位置求解,图形化显示以及其它方面的内容会陆续上传
机器人多原则优化设计
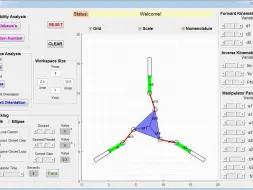
设计GUI进行3PRR平面并联机构的运动与性能分析
机器人基本控制算法
采用七次多项式、冲击(jerk)最小为目标进行机械臂的轨迹规划
机器人刚度的概念,基本建模与评价方法
机器人运动分析-速度(雅克比矩阵)与加速度方程
并联机器人动力学建模虚功原理方法
CAD方法找寻delta机器人的工作空间
机器人刚度建模的解析法-虚拟弹簧或者虚拟关节法
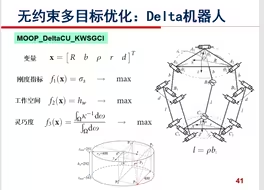
不完全对称的Delta机器人多目标优化设计(刚度、工作空间、灵巧度指标最大化)
MATLAB的gui设计与机器人配置显示
机器人MATLAB-Adams联合仿真
上下结构最怕的写法是啥?
机械臂模糊(fuzzy)前馈控制
机械臂前馈控制(torque Feedforward control)
伺服顶升机构设计的好不好,要看这些设计细节有没有做到位
机器人SolidWorks-simscape联合仿真
第412期 机械原理基础-不间断可调线性振荡
环形流水线 | 一分钟非标机构库
可伸缩传送皮带机构
MATLAB-ANSYS/workbench联合仿真,一个简单案例,二连杆机械臂
采用第二类拉格朗日方法进行平面二连杆机械臂的动力学建模,MATLAB仿真
【PS教程】100集(全)从零开始学Photoshop软件基础(2024新手入门实用版)PS2024零基础入门教程!!!
【全168集】比付费还强100倍的PS2024最新版自学全套教程,全程通俗易懂,别再走弯路了,小白看完速通Photoshop!
七种齿轮机构
培训机构的答案与阅卷答案的差距(10)
空头机构:这次,我将会把所有的韭菜,连根拔起!#a股 #3400点 #做空机构
比特币接下来的一周至关重要!狗狗币大行情要来了!
揭秘十大IT培训之火星时代
1. The Geometry of Linear Equations [J7DzL2_Na80]
平面五连杆机构的速度加速度方程,使用MATLAB实现动态轨迹追踪,输出末端执行器和关节运动参数
开关门机构原理动画
行程可调PPU结构分享
第379期 机械原理基础-90度翻转
【理论力学2024授课作业1】物体的受力分析
一种高速翻面机构分享
币安何一:币圈要完了? Binance选择躺平?
10. The Four Fundamental Subspaces [nHlE7EgJFds]