V
主页
京东 11.11 红包
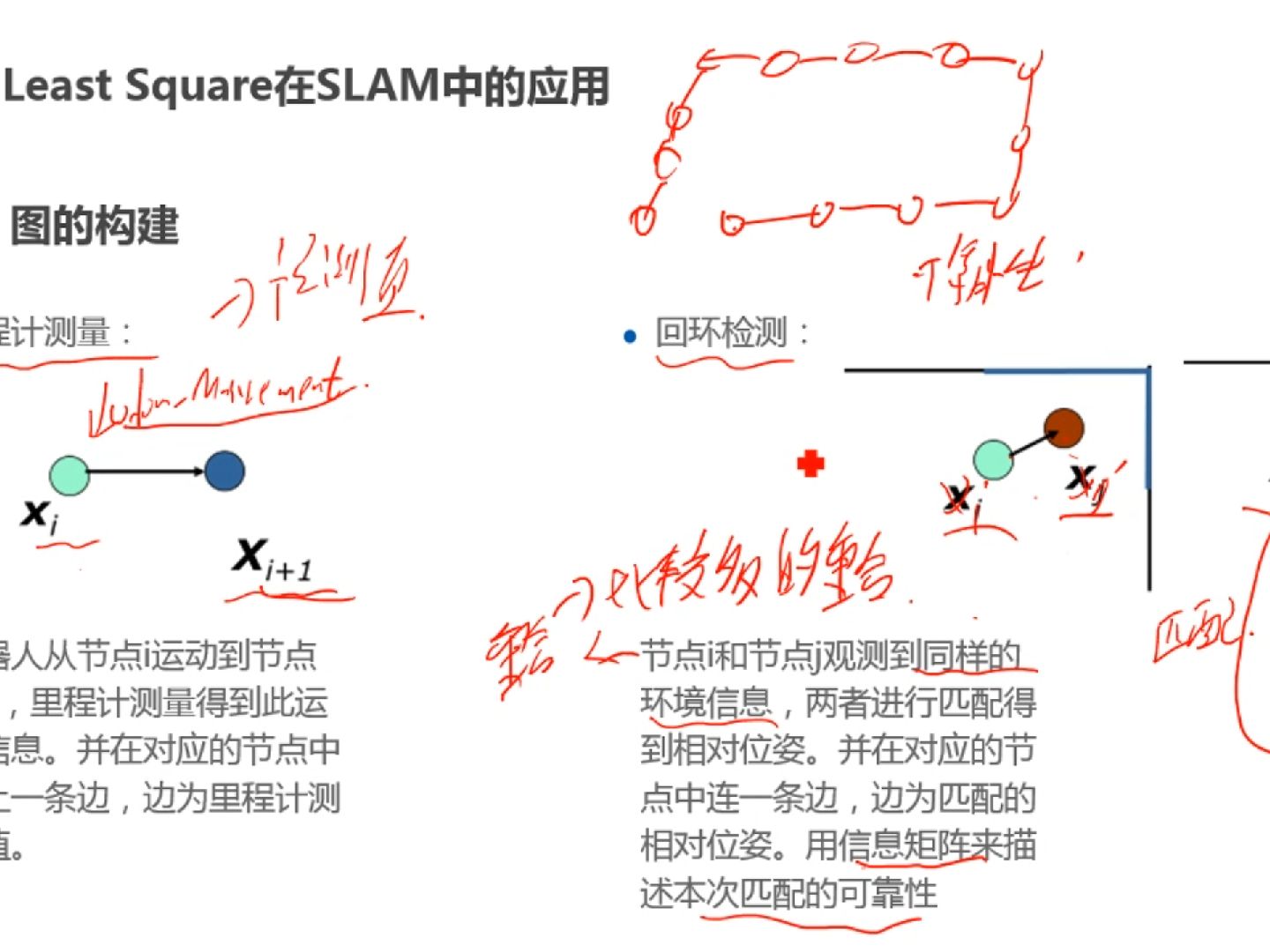
第6节 基于图优化的激光SLAM方法(Grid-based) (3)
发布人
还原最好的ROS入门体验,起航机器人开发之路!
打开封面
下载高清视频
观看高清视频
视频下载器
第6节 基于图优化的激光SLAM方法(Grid-based) (2)
第5节 基于滤波器的激光SLAM方法(Grid-based) (2)
第5节 基于滤波器的激光SLAM方法(Grid-based)
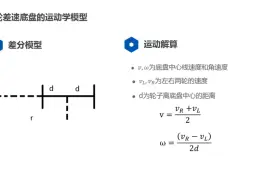
第2节 传感器数据处理I:里程计运动模型及标定
第1节:激光SLAM简要介绍
SLAM为什么需要IMU
轮式里程计激光里程计视觉里程计区别是什么
第11课.底层-电机PID控制算法代码讲解
第3节 传感器数据处理II:激光雷达数学模型和运动畸变去除
第24课.机器人巡线代码讲解
第3讲:机器人系统设计
第04课.Rviz工具学习使用
第00课.学习路线规划
第5讲:机器人感知
为什么需要多传感器融合
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
第2讲:ROS基础
第27课.RGBD-Slam融合原理讲解
SLAM为什么需要闭环检测
第18课.Hector_slam建图
第31课.机器人同步建图和导航
DOM-60 为机器人带来前所未有的感知能力
第29课.配置cartographer使用IMU数据建图
SLAM-Viewer,SLAM便捷可视化小工具
第28课.RGBD-Slam建图导航
第9讲:ROS2.0
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
第16课.机器人gmapping建图
第13课.ROS层PID可视化参数调节
C4D自定义激光效果
第32课.orb_slam2三维定位
第26课.系统烧写课程指导
第03课.ROS分布式组网
视觉惯导融合SLAM内外参标定是关键
slam多功能救援无人机
SLAM为什么需要机器学习
马斯克特斯拉机器人的最新视频和技术解析
激光演示秒懂光学规律
第30课.机器人自主探索建图
Arduino导弹防御雷达系统教程