V
主页
天翼云合营地区搭建爱快ros支持l2tp pptp教程
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
天翼云多ip利用CentOS7.6 linux搭建SK5教程
天翼云搭建爱快软路由系统
ros系统rcfusion多模态复现
MoveIt与Isaac Sim结合使用
天翼云合营多ip利用Windows2012中文使用CCProxy搭建sk5和http
【开源无人车】从零调试一辆PIX无人车
ROS与STM32通信编程(下)
7.2无人机PID参数调试
【开源无人机】从零调试一架开源无人机M0-F250
自动驾驶入门技术全栈实战解析-1-感知篇
【开源无人机】ROS无人机编队代码讲解
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
爱快Q6000,WIFI6 企业级无线路由器,使用分享
【开源无人车】从零组装一辆开源PIX无人车
12步搭建智能机器人: 从设计到AI入门
基于Gazebo的无人车激光SLAM建图与导航仿真
学长说:有佬的帮助就是不一样!!!
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
01.iKuai——朴素的实力派
自驾车ROS实践 - Self Driving and ROS – Learn by Doing! Odometry & Control
20平方就能搞定上百台电脑
【开源无人机】ROS系统中yolo模型处理多摄像头
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
NVIDIA Isaac ROS 3.0:重塑机器人未来
ROS与STM32通信编程(上)
【开源无人机】从零组装一架开源无人机M0-F250
【开源教程】ROS驱动程序控制舵机(源码资源链接在简介)
爱快系统不要裸奔~开启IPV6功能+ACL规则防护
ROS控制 | 小车底盘控制讲解
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
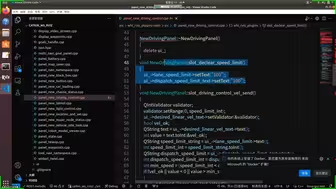
QT人机交互界面开发方法:自车位姿显示、故障监控、车辆指令、任务下发,车辆载重设置、ROS通讯、QT5&C++ - 主讲人:孟春阳
室外ROS 省赛实录 [速度较慢可以展示]
深度视觉,三维感知!全新3D深度视觉机械臂闪亮登场,空间抓取、体积测算统统不在话下!
爱快Q3S测评,爱快系统介绍,与普通路由器有什么不同
苹果垃圾桶安装PVE做企业服务器,爱快做主路由;istoreos做旁路由科学上网;黑群晖+百度网盘做文件服务器;debian做web,windows做桌面机
谁是 Wi-Fi7 性价比之王!爱快q3600和小米 be3600到底谁更强?
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
路由器领域的群晖,爱快Q6000~强大的专业系统非常亮眼,但使用门槛不低~
穷鬼300元DIY软路由,低功耗带2.5G网口,不用等开车,自己上高速!下期抽奖预告!
【天大航模队2024新生培训】第二课:linux基础操作与ROS入门