V
主页
SSH登录
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ROS如何用激光雷达建图
roslaunch文件与参数服务器
RVIZ配置方法
ROS传感器介绍
【开源无人机】从零调试一架开源无人机
TF坐标变换
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
如何把ROS和STM32联系起来
ROS多机通信设置
程序修改编译与SublimeText简析
查看里程计、IMU话题信息
基于ros路径规划+避障演示
2.0_(1)C++&QT&ROS联合编程项目实战_ROS串口网口工具 简单架构设计&ROS模块移出
【汽车】软件定义汽车:基于Simulink开发面向服务的应用
套件教程-RTABMap之3D雷达定位与导航
ROS 颜色目标识别与定位的 Python 实现
2.4_ROS串口网口工具:Qt UI与串口模块连接 调试与说明_致敬国产3A游戏 _游戏引擎与物理引擎
【开源无人船】从零组装一艘开源ROS无人船
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
【开源无人机】Vins_fusion代码讲解
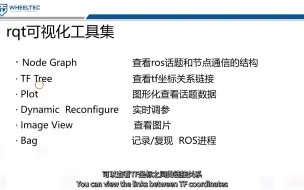
rqt可视化工具集
2.1_C++&QT&ROS联合编程项目实战_ROS串口网口工具:串口模块开发
《ROS自主无人机:从理论到实践》首期训练营 自主定位| 场景重建| 规划导航
ROS话题
基于多智能体强化学习的多小车建图与导航
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
算是ros大作业,但是没在调车
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
【开源无人机】舵机控制教学
【开源无人机】4G模块及远程连接使用教程
《松灵ROS 2开讲啦》第六期 Nav2导航应用
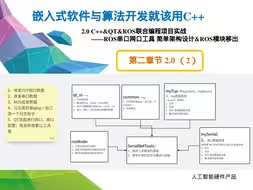
2.0_(2)C++&QT&ROS联合编程项目实战_ROS串口网口工具 简单架构设计&ROS模块移出
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
视觉SLAM第六讲 后端优化
ROS机器人基于gmapping的slam自动导航建图!
ROS 相机图像获取的 Python 实现
【开源无人机】vins定位手动飞行
基于yolo和moveit的图像识别机械臂目标抓取搬移
超维小课堂(三十一):MAVROS无人机姿态控制接口
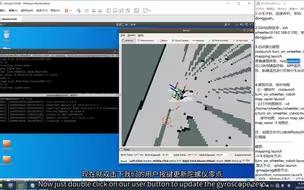
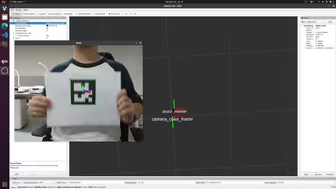
【考核用】调用opencv识别aruco码,在ros中更新tf