V
主页
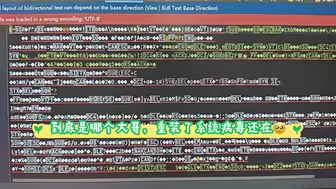
大三菜鸡毕设:无需GPU即可实时的高精度动态SLAM[开源]
发布人
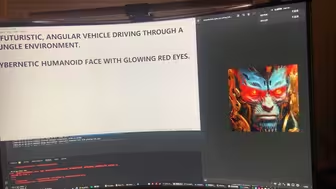
论文:arXiv:2405.07392 代码:https://github.com/yuhaozhang7/NGD-SLAM 利用先前的分割结果快速为当前帧的动态物体生成mask,使跟踪线程不必等待神经网络的输出。 混合使用光流与ORB特征进行静态关键点跟踪。 深度模型直接用OpenCV读取、推理,环境配置与ORB-SLAM3完全一致(已在Ubuntu20.04与22.04测试)。
打开封面
下载高清视频
观看高清视频
视频下载器
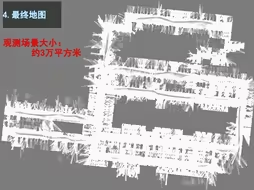
Lifelong SLAM ! 树莓派4B也能建3万平方米的大地图,还能实时动态更新!
不是吧,这也能毕业😅(捡球小车)
少儿编程不要自嗨了!
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
硕士毕业答辩前一晚,不愧是我们化工人
加油机竟然用Ubuntu系统!!!!
我的硕士论文创新点:
毕业答辩最强电源直接上电
你的电脑响了一晚上,起来发现几十个t的数据全被加密了
“一稿多投”是怎么被发现的?被拒稿后另投他刊,仍被判定“一稿多投”?
第十五届蓝桥杯EDA国赛遗憾离场(只求连通,布线一个规则都没对)
麻省理工教授:单身30年才有资格成为人肉换向器!
进国赛了,可以发了
我的毕设让美军坐立不安
关于我在学校死活做不出来的SDR实验,回家发现天线是断的
哈工大激光-惯导SLAM建图
参观南方科技大学,只能说太🐮🍺了
实测用GPT4-o半接管PC 调用成本每次0.05元人民币非常高 本来想操作AI玩游戏的 只能等等
我价值几百万的毕设明天就要答辩了,好紧张!
纯视觉实时建图,论如何把单目相机玩成激光雷达
像大疆这样的公司会不会用STM32这样的满大街都是的芯片?
室友沉迷学习,18科满绩,觉得大学没意思,退学了
手写多目视觉SLAM
基于 ORBSLAM3的室内重建
本科毕设 (基于FPGA的)光线追踪渲染器设计实现
[西安科技大学]用新学的FOC和Opencv做个电赛自动追踪控制系统,弥补下去年国二的遗憾
同志们,可以去知网领取自己毕业论文的稿酬啦,硕士毕业论文60,博士毕业论文100,已经把硕士论文的稿酬领到啦~
上海交通大学2004届计算机硕士二十年再聚首
程 序 员 狂 喜 显 示 屏
中国大学史上最水毕设
基于YOLOV8的疲劳检测,考试破防周,你疲劳吗?
实验室研二师妹说她在yolo-v5里面加了transformer网络是什么水平?
哥伦比亚大学硕士生,抱娃参加毕业典礼,期末考试后第二天生了宝宝
我的vscode太丑被同事们嘲笑了,直到我掏出这些...
毕业答辩有我导,我离上岸更远了
写博士大论文的深夜,焦虑失眠了,翻出五年前的本科毕设视频炒一炒:“鱼翔”便携式AUV(自主水下机器人)-轻巧便携、功能强大、价格低廉
985南京大学毕业的废物花5天5夜研究一道初中数学题,甚至动用python解题,感觉自己的数学实力回到了高考前的癫疯状态,堪称最有文化的一集。
科研人员3D打印开发出可应对复杂地形的变形轮子
基于yolov5的学生行为状态监测系统,openvino加速
研究进度