V
主页
JetsonNano-T265-csi摄像头使用教程
发布人
代码开源网站:https://gitee.com/bingobinlw/volans 若不想手动搭建,视频同款现成虚拟机在这里哦:https://gf.bilibili.com/item/detail/1103796044 本课程致力于无人机+PX4+ROS开发的入门开发能力,内容涵盖无人机飞控发展、使用Pixhawk组装无人机的相关硬件、使用PX4配套的相关软件、PX4固件下载与仿真环境配置、QGC地面站使用教程、PID控制原理解析、飞行日志的分析和数据处理以及开发者素养等部分。
打开封面
下载高清视频
观看高清视频
视频下载器
ROS+PX4开源无人机系列-T265定位和坐标系转换
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 1.无人机、PX4、ROS必知知识
最便宜的虚拟制片跟踪定位摄像头?T265效果如何
jetson nano 摄像头插接方式
【低成本DIY】自主ROS无人机-17. t265参数、代码讲解及悬停测试
双目惯性摄像头(intel realsense t265)实现ORB-SLAM3 1.0
【低成本DIY】自主ROS无人机-1. 课程及功能介绍
【匿名拓空者】室内T265+光流定点
树莓派初次安装CSI摄像头,motion运动检测(新手)
XTDrone: 基于PX4、ROS和Gazebo的无人机通用仿真平台简介
Mavros和Mavlink究竟是什么东西?
【阿木新课】新手入门PX4工程应用开发?看这门课就够了
【开源无人机】T265的室内定位与激光雷达的环境感知
低成本摄像机跟踪,Intel T265 UE跟踪教学
[组合拳]matlab写算法->PX4去控制->ROS来可视化
树莓派4之CSI摄像头使用指南
Realsense t265怎么使用|Intel|安装驱动和SDK|连接设备|软件开发环境配置|获取数据流|处理数据
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 4.无人机offboard控制
Matlab Simulink (A_star避障仿真)与PX4、ROS联调教程
MatlabSimulink(无人机避障)与ROS联调教程
【中英字幕】Intel英特尔RealSense双目鱼眼镜头追踪摄像头T265开箱和测试 Tracking Camera
t265无人机定点
激光雷达定位和激光定高
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 2.仿真环境介绍及其配置
【四旋翼无人机】T265融合惯性单元辅助无人机定点巡航
[仿真]无人机全自主探索+导航的代码及逻辑教学
mavros、px4固件、volans介绍和使用
【机器人大家说】英特尔RealSense追踪传感器T265产品解析 VR虚拟现实 英特尔讲师解答
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 3.仿真环境开发
【开源所有】ubuntu18.04+px4+ros+matlab2020a+mavros安装指导
无名创新——树莓派4B+ROS+T265/RPLIDAR A2室内定位替代光流开源方案
树莓派搭载Intel深度追踪相机T265,结合飞控实现室内cm级精准定位。重现21年电赛植保无人机。
PX4固件二次开发初级课程 无人机飞行器设计与控制 Pixhawk方向
[仿真]无人机2D导航的代码及逻辑教学
【干货】如何学习ROS+PX4?万变不离其宗!
全中国搞路径规划的研究生都进来看!不仅对路径规划,我们也要对心规划!
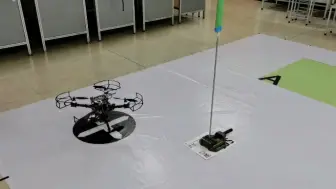
二维码精准自主降落|展示|教程
创乐博英伟达Jetson Nano 4GB python AI人工智能开发入门视频课程 2023年持续更新中……
Ubuntu+Ros+Px4+Matlab可直接打开并使用的虚拟机!