V
主页
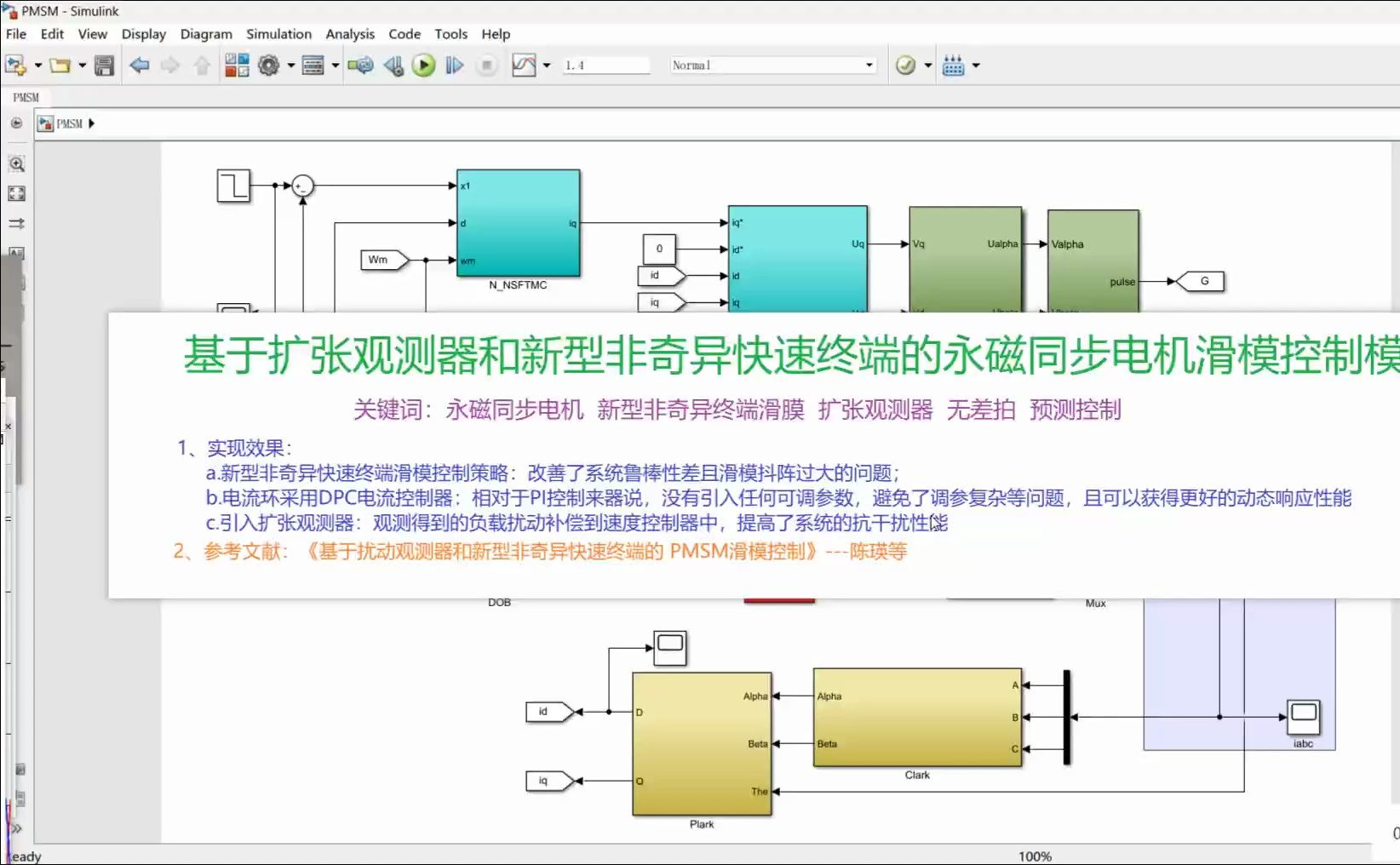
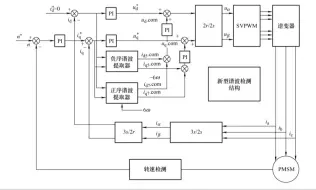
基于扩张观测器和新型非奇异快速终端滑模的永磁同步电机无差拍预测控制模型
发布人
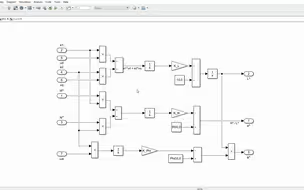
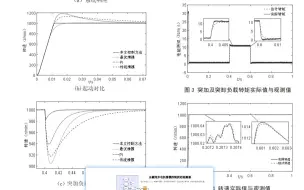
基于扩张观测器和新型非奇异快速终端的永磁同步电机滑模控制模型 关键词:永磁同步电机 新型非奇异终端滑膜 扩张观测器 无差拍 预测控制 1、实现效果: a.新型非奇异快速终端滑模控制策略:改善了系统鲁棒性差且滑模抖阵过大的问题; b.电流环采用DPC电流控制器:相对于PI控制来器说,没有引入任何可调参数,避免了调参复杂等问题,且可以获得 更好的动态响应性能 c.引入扩张观测器:观测得到的负载扰动补偿到速度控制器中,提高了系统的抗干扰性能 2、参考文献:《基于扰动观测器和新型非奇异快速终端的 PMSM滑模控制》---陈瑛等
打开封面
下载高清视频
观看高清视频
视频下载器
永磁同步电机模型预测电流控制双矢量改进(电流环)+滑模控制(速度环,新型趋近律与扰动观测器结合)
基于无差拍预测控制加入延时补偿的永磁同步电机仿真
【一区论文复现】微电网分布式预测控制和二次控制及通信延时研究
基于DSP28335的永磁同步电机FOC矢量控制代码无感滑模控制转速电流双闭环
【文章复现】永磁同步电机PMSM负载估计 负载转矩预测龙伯格观测器卡尔曼滤波器
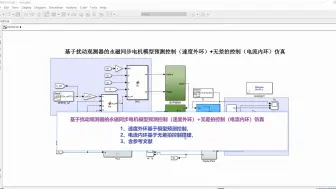
基于降阶龙伯格扰动观测器的永磁同步电机模型预测控制(速度外环)+无差拍控制(电流内环)仿真
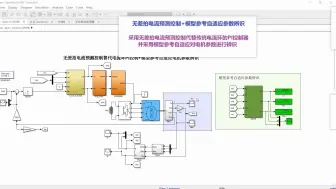
永磁同步电机模型参考自适应参数辨识(无差拍电流预测控制替代电流环PI控制)
永磁同步电机模型参考自适应PMSM参数辨识算法
基于内环有限集模型预测(FCS-MPC)+外环滑模控制+龙伯格观测器的永磁同步电机研究
永磁同步电机控制谐波注入抑制5和7次谐波SVPWM调制改善电流
基于连续终端滑模控制(CT-SMC)和 模糊超螺旋滑模观测器(F-ST-SMO)的永磁同步直线电机(PMLSM)交流调速系统
基于自抗扰(ADRC)控制和eso扩张状态观测器永磁同步电机无位置传感器仿真
【EI期刊控制复现】基于非线性干扰观测器(NDOB)的滑模控制(SMC)Boost变换器
基于滑膜控制扰动观测器的永磁同步电机模型传统滑模控制器最优滑模控制器改进补偿滑膜控制器比较
【一区论文复现】自适应强化学习机械臂控制
基于改进超螺旋滑模观测器的永磁同步电机无位置传感器控制
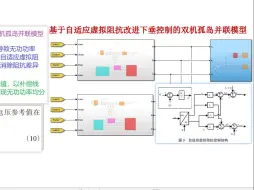
基于自适应虚拟阻抗改进下垂控制的双机孤岛并联模型
【网盘自取】锁相环理论知识分享
PMSM谐波抑制算法基于DQ轴谐波提取器的永磁同步电机仿真
【网盘自取1】永磁同步电机控制入门到进阶—速成!!!
基于自抗扰控制(ADRC)和有限集模型预测(FCS-MPC)的永磁同步电机模型
基于MATLAB机械臂自适应模糊滑模控制仿真多种控制比较
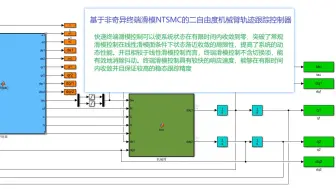
基于非奇异终端滑模NTSMC的二自由度机械臂轨迹跟踪控制器
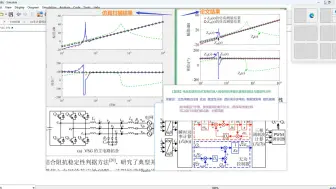
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
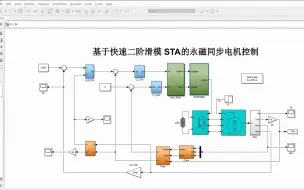
基于快速二阶滑模STA与扰动观测器的永磁同步电机PMSM滑模控制
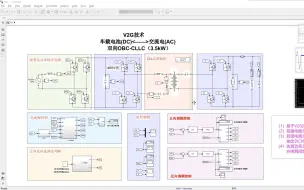
基于V2G技术的双向AC/DC和DC/DC充放电机OBC电动汽充电桩充放电接入交流电 (正向PFC+CLLC,反向并网+CLLC)
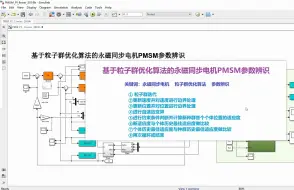
基于粒子群优化算法的永磁同步电机PMSM参数辨识
基于单矢量模型预测电流控制的永磁同步电机仿真模型(可选单矢量/双矢量/三矢量)
光储充+三相并网交直流系统(一)(带电池负载) 基于Matlab/simulink光储充交直流并网仿真(光伏储能充电桩交直流系统)可孤岛运行可并网运行
基于拓展卡尔曼滤波EKF的永磁同步电机参数辨识
基于LQR控制主动悬架模型7自由度(整车)
【MPC】二自由度机械臂模型预测控制MATLAB 带参考文献
【网盘自取】电机控制软件设计和硬件设计解析文档资料
基于查表法的永磁同步电机控制
【复现】二自由度机械臂自适应分数阶滑模控制
储能电池充放电控制
基于 S 函数的 BP 神经网络 PID
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
基于模糊PID控制和传统PID控制的永磁同步电机模型
【复现】电压型虚拟同步发电机接入弱电网的序阻抗建模扫频法与稳定性分析