V
主页
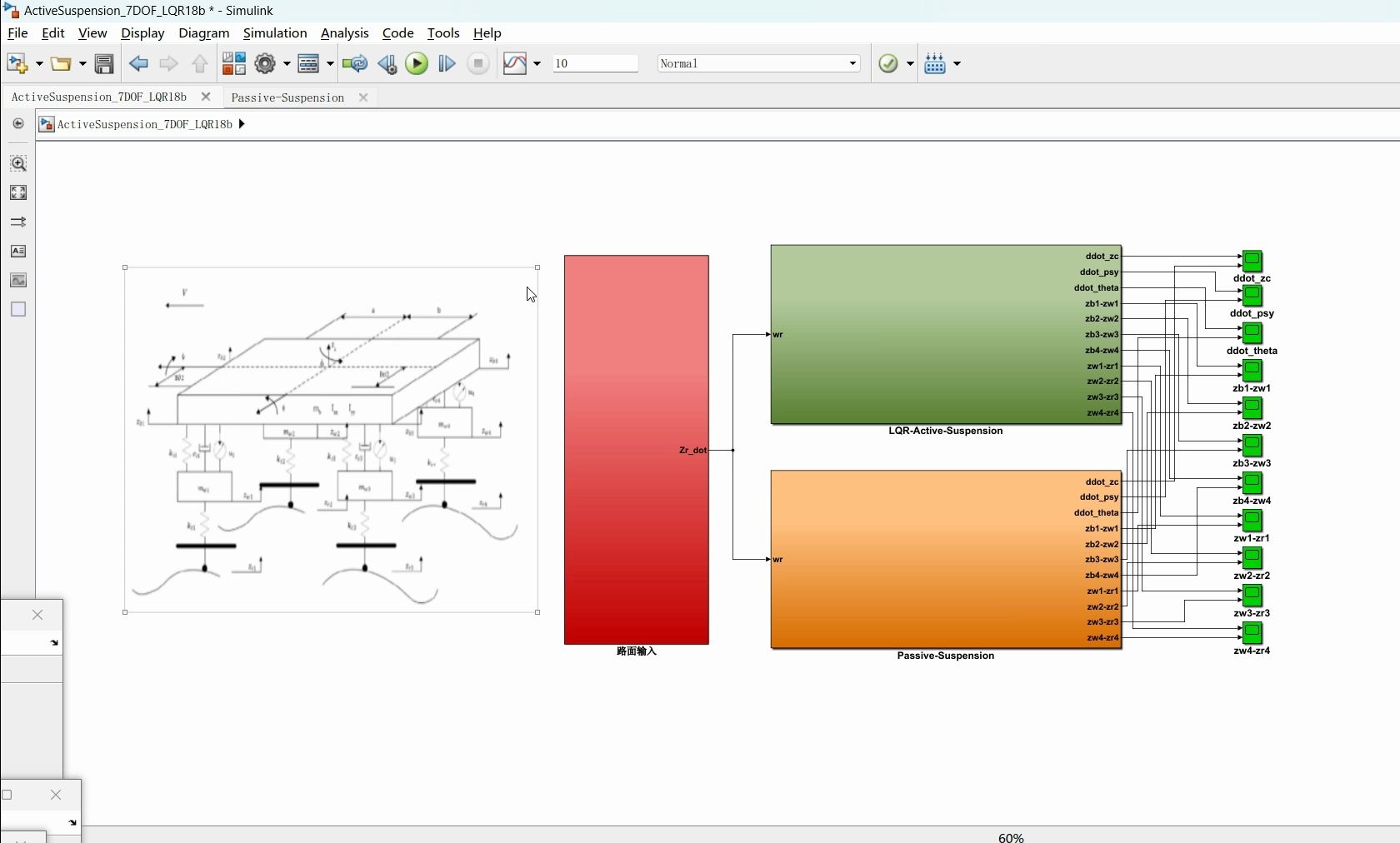
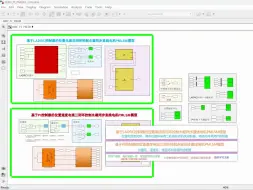
基于LQR控制主动悬架模型7自由度(整车)
发布人
基于LQR控制主动悬架模型7自由度(整车) 1、LQR就是依据反馈控制的结构,LQR的目标是通过找到一个状态反馈控制器𝑢=−𝐾𝑥使得代价函数J最小,考虑系统的状态加权(控制效果)和输入加权(输入大小),以状态反馈控制的形式,根据自定权重,求解出最优的反馈系数K。 2、模型对比了主/被动悬架的系统响应结果,如悬架动挠度、簧载质量加速度、俯仰角速度等 3、路面可选择减速带路面或者随机路面(A~H级别) 4、内容包括算法介绍,建模文档,运行说明和参考文献
打开封面
下载高清视频
观看高清视频
视频下载器
01 约束系统介绍
【网盘自取5】运算放大器模电基础知识电力电子硬件基础
【一区论文复现】自适应强化学习机械臂控制
【复现】基于双向反激变换器锂电池SOC主动均衡控制
基于DSP28335光伏并网逆变器源代码原理图PCB方案
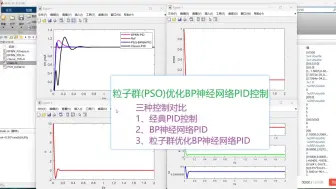
粒子群(PSO)优化BP神经网络PID控制
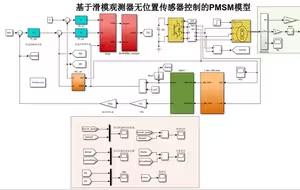
基于滑模观测器SMO无位置传感器控制的PMSM模型
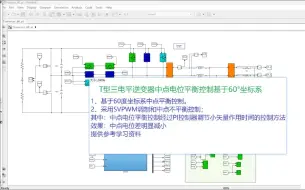
T型三电平逆变器中点电位平衡控制基于60°坐标系(含算法文档和参考文献)
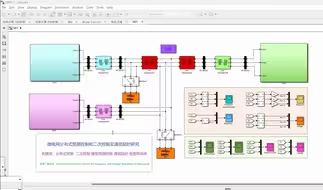
【一区论文复现】微电网分布式预测控制和二次控制及通信延时研究
【网盘自取】电机控制软件设计和硬件设计解析文档资料
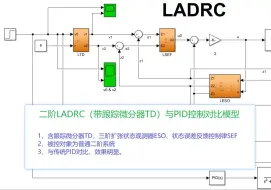
二阶LADRC(带跟踪微分器TD)与PID控制对比模型
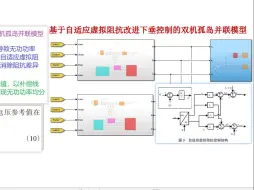
基于自适应虚拟阻抗改进下垂控制的双机孤岛并联模型
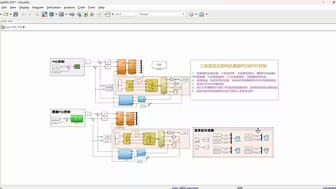
三相交错并联LLC谐振变换器闭环控制仿真
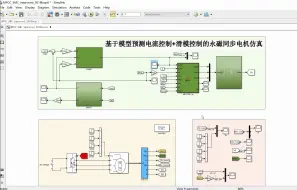
永磁同步电机模型预测电流控制双矢量改进(电流环)+滑模控制(速度环,新型趋近律与扰动观测器结合)
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
三相直流无刷电机模糊PID和PID控制
Buck变换器Mathcad计算书(包括损耗计效率温升电感计算电容开关管选型)
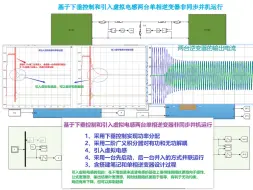
基于下垂控制和引入虚拟电感两台单相逆变器非同步并机运行
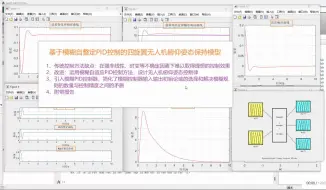
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型
基于模型预测控制和下垂控制的光伏储能充放电模型
基于LADRC控制位置电流双闭环和PI控制三闭环控制永磁同步直线电机PMLSM模型
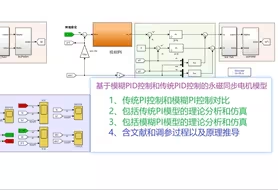
基于模糊PID控制和传统PID控制的永磁同步电机模型
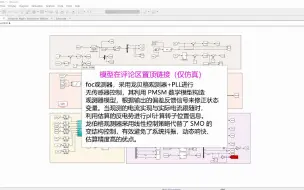
基于matlab建模FOC观测器采用龙贝格观测器+PLL进行无传感器控制(建议二倍速观看)
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
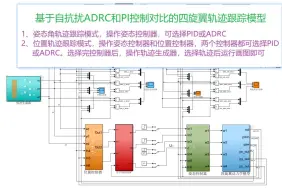
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
基于DSP28069的30kw三相PFC充电桩T型三相维也纳原理图及代码(锁相环采用先进正负序分离含中点平衡控制PWM控制)
双向储能逆变方案代码及PCB原理图48V-2000W
基于均值比较模糊控制的锂电池组SOC主动均衡
二分之一车辆悬架模型
基于双值比较(差值和均值)模糊控制的锂电池组SOC主动均衡
单相逆变器LCL并网电容电流前馈和电网电压全前馈(阮新波老师)
光储充+三相并网交直流系统(一)(带电池负载) 基于Matlab/simulink光储充交直流并网仿真(光伏储能充电桩交直流系统)可孤岛运行可并网运行
基于双下垂控制互联变换器ILC的光伏交直流混合微电网离网(孤岛)模型
基于平均电流控制和占空比前馈的单相boost PFC仿真(参数计算和器件选型)
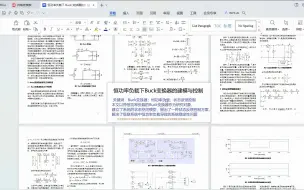
关于恒功率负载下的Buck变换器建模与控制 状态反馈控制
【网盘自取1】永磁同步电机控制入门到进阶—速成!!!
基于stm32低压无感BLDC方波控制方案(代码+原理图)
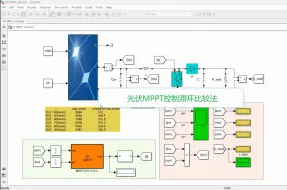
光伏MPPT控制滞环比较法
PID控制四旋翼轨迹跟踪含三维图像模型
基于 S 函数的 BP 神经网络 PID