V
主页
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(下)
发布人
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(下)
打开封面
下载高清视频
观看高清视频
视频下载器
哈工大、清华联合开源GPS-Gaussian:可泛化的像素级三维高斯溅射,实时人体新视图合成
【直播回放】武汉大学开源SLAM详解!低成本轮式机器人定位算法 Wheel-INS
SLAM入门简介及ORB-SLAM2论文精讲
经验分享:我的SLAM学习之路-答疑交流
激光惯性SLAM学习经验分享(附论文详细解读!)
【直播回放】一位学姐的SLAM科研经历和秋招经验分享!
北航小姐姐带你精读SLAM综述论文
RGBD稠密重建开山之作-KinectFusionLib代码解析(下)
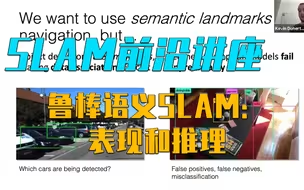
【SLAM前沿讲座】MIT|鲁棒语义SLAM:表现和推理
【直播回放】SLAM学习分享及交流心得-ORB-SLAM3
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
【直播回放】近期SLAM论文速览!干货满满!
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
r3live语义建图
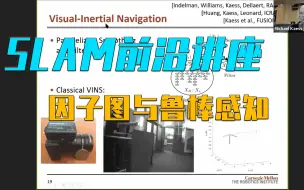
【SLAM前沿讲座】CMU|因子图与鲁棒感知
1.2 如何快速学习开源代码?
立体匹配算法原理与应用-奥比中光
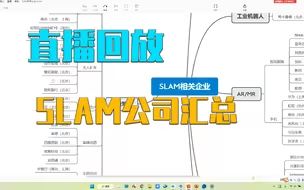
【直播回放】SLAM公司汇总
传感器在SLAM算法部署中的经验及避坑
【直播回放】SLAM常见面试问题浅析
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
【带你读论文】S-MSCKF论文及算法框架详细解读
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(下)
如何快速入门三维重建?应用场景、岗位要求及薪资、技术框架
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
【直播回放】一个本科生从小白到菜鸟的SLAM进阶之路
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
SLAM初学者常问的几个问题
波士顿动力机器人,要成精了!
01-NeRF与SLAM结合的早期探索
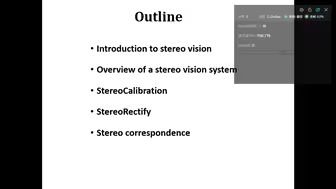
Stereo Vision——stereo matching
【SLAM前沿讲座】生物启发SLAM:我们从哪里来,我们能去哪里?|昆士兰科技大学
【3D数学】欧拉角万向节死锁与插值
SLAM知识星球直播答疑及抽奖
ICRA 2022盘点:SLAM方向十大重点论文解读
[ICRA 2024] GCM
【六哥答疑】入门视觉SLAM,需要了解什么框架?
苏黎世皇家理工等发布!带闭环稠密神经SLAM