V
主页
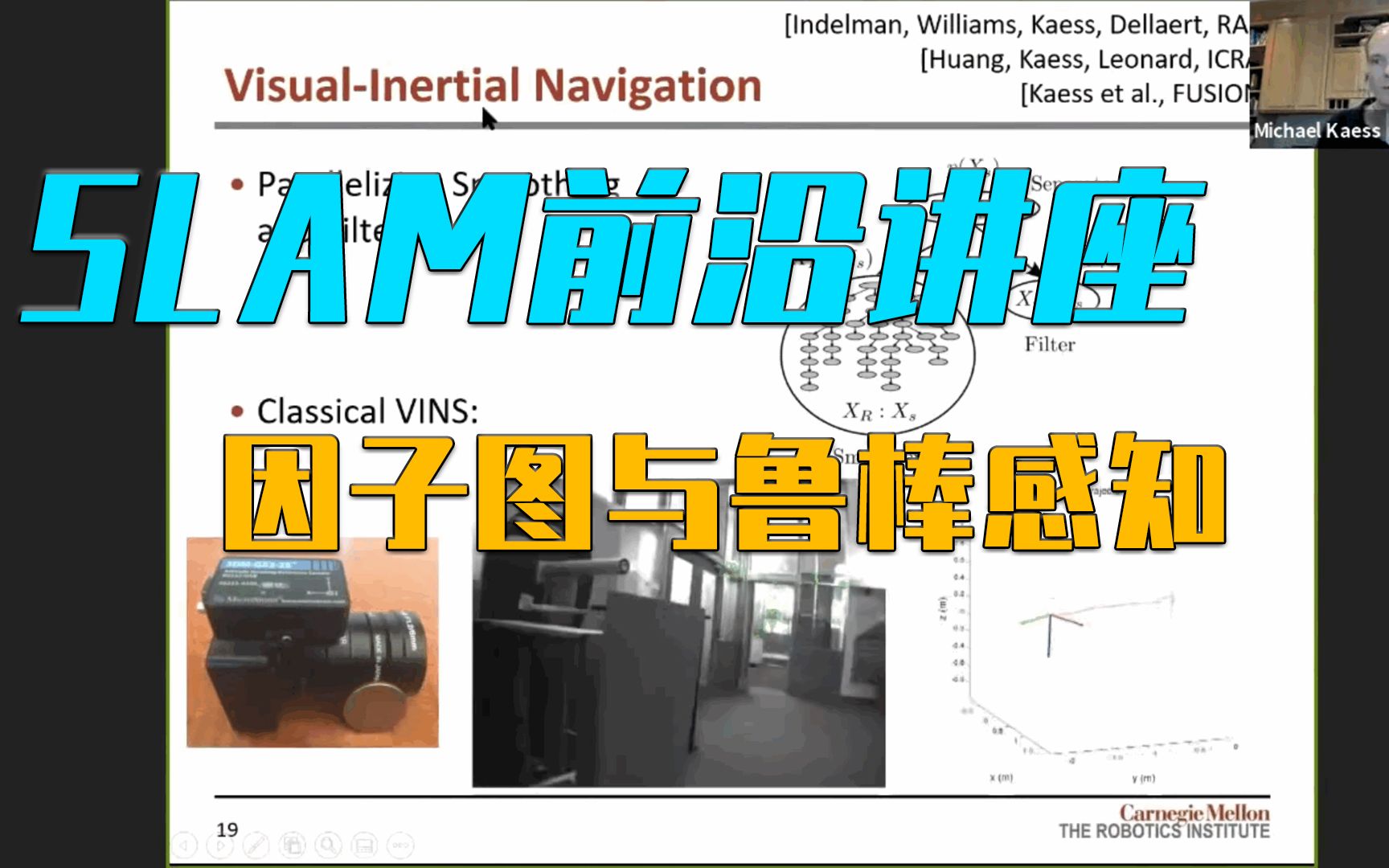
【SLAM前沿讲座】CMU|因子图与鲁棒感知
发布人
https://www.youtube.com/watch?v=JmR2YpkLNt0&t=1130s 学习教程官网:cvlife.net 1、视觉SLAM:ORB-SLAM2(必学基础) 2、视觉惯性SLAM:ORB-SLAM3,VINS-Mono、VINS-Fusion 3、激光/多传感器融合SLAM:Cartographer,LeGO-LOAM、LIO-SAM、LVI-SAM 4、三维重建:视觉几何OpenMVS,深度学习重建MVSNet、PatchMatchNet、JDACS-MS 5、机器人运动规划:Navfn、Dijkstra、A-Star、DWA、TEB 6、相机标定:单目/鱼眼/双目/阵列
打开封面
下载高清视频
观看高清视频
视频下载器
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
【SLAM前沿讲座】MIT|SLAM的过去、现在和未来
【SLAM前沿讲座】佐治亚理工|用于感知和行动的因子图
【SLAM前沿讲座】特拉华大学|视觉惯性估计与感知
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
ICRA2022|单个360°相机的视觉里程计,无需校正即可获得全方位感知!港科大发布
1.2 如何快速学习开源代码?
【SLAM前沿讲座】智利大学|用随机有限集统一SLAM的前后端
哈佛大学《统计学110(概率论)|Statistics 110: Probability》中英字幕(GPT-4翻译)
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
【六哥答疑】多传感器融合SLAM如何开始研究呢?有哪些研究方向?
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
【最新开源】人脸编辑玩出不同花样!可改动年龄、操控表情等,太真实了!华南理工等新发布,ECCV2022
IMU选型、标定误差分析、AHRS组合导航
【直播回放】用于3D激光雷达SLAM闭环检测的词袋模型 BoW3D
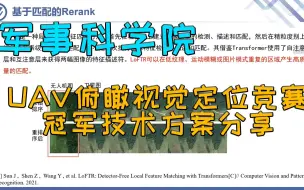
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
CMU《凸优化|CMU 10 725 Convex Optimization fall 2018》中英字幕(豆包翻译)
【开源】ICRA2022|基于激光雷达的终身地图构建和维护框架!
【三维重建】spotlessSplats:能忽略移动物体干扰的3DGS场景重建!
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
基于ros2-humble的lio-sam的建图自动导航仿真
【开源】基于激光点云的无监督类无关实例分割算法,RAL22!
手把手教你学习标定基础知识
【哈佛大学公开课】领袖心理学
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
1.4 ORB-SLAM2算法框架详解
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
【开源】CVPR2022|UBC&谷歌研究光场渲染的新视图合成,可准确再现场景!解决了反射、折射和半透明等问题!
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
ICRA22 CMU机器人所讲座 | 机器人自主导航开发环境
斯坦福大学2024秋季AI课程第一讲 《AI觉醒:如何在人工智能浪潮中找准自己的位置》
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
【最新开源】单目RGB视频就可重建出会动的4D仙人掌玩具!
点云还能做预言家了?!德国波恩大学最新开源,自监督的三维点云预测!CoRL2021
TUM与CMU联合开源! 可微无碰撞参数走廊
100集全【精讲西游记】北大名师精讲西游记 视频+音频+PDF