V
主页
京东 11.11 红包
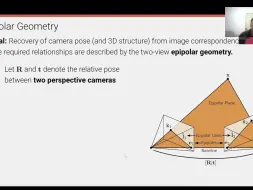
重建与运动——1对极几何与图像矫正
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【德国图宾根大学-自动驾驶课程】目标跟踪——2贝叶斯滤波
【德国图宾根大学-自动驾驶课程】里程计与SLAM——3VO:对极几何/非线性优化BA/直接法
【德国图宾根大学-自动驾驶课程】自动驾驶的历史
【德国图宾根大学-自动驾驶课程】重建与运动——2立体视觉匹配与深度图
【德国图宾根大学-自动驾驶课程】里程计与SLAM——5定位:卫星定位,视觉定位,地图定位
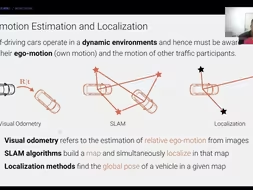
【德国图宾根大学-自动驾驶课程】里程计与SLAM——1介绍:里程计与SLAM和定位之间的关系
【德国图宾根大学-自动驾驶课程】目标跟踪——3数据关联
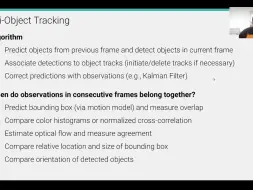
【德国图宾根大学-自动驾驶课程】目标跟踪——4整体理解
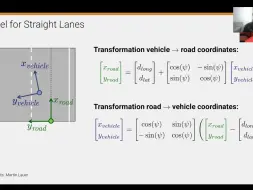
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——4车道检测
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——2道路分割
【哥伦比亚大学CV课程】002运动恢复结构SFM——1运动恢复结构的问题
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——5车道跟踪
【德国图宾根大学-自动驾驶课程】目标检测——1介绍
【德国图宾根大学-自动驾驶课程】目标跟踪——1介绍
【哥伦比亚大学CV课程】001光流——4由粗糙到精细的光流估计
【德国图宾根大学-自动驾驶课程】重建与运动——4场景流
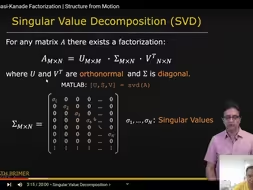
【哥伦比亚大学CV课程】002运动恢复结构SFM——4TK分解求M和S
【哥伦比亚大学CV课程】012未校正的立体视觉——1问题引入
CT重建原理:平行投影重建与拉东变换
【哥伦比亚大学CV课程】001光流——2光流限制方程
7最小二乘的BPF重建
【哥伦比亚大学CV课程】012未校正的立体视觉——5计算深度
CT重建原理:平行投影重建与拉东变换2
【哥伦比亚大学CV课程】014边缘检测——4泛化的霍夫变换
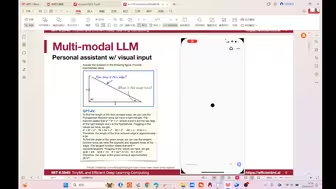
【MIT的模型压缩与优化课程】12.0Transformer和LLM——Transformer的基础结构
【德国图宾根大学-自动驾驶课程】目标检测——5_3D目标检测1
【哥伦比亚大学CV课程】011校正的立体视觉——1相机模型与内外参矩阵
【哥伦比亚大学CV课程】009失焦深度估计——1PSF函数
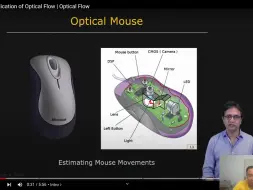
【哥伦比亚大学CV课程】001光流——5光流的应用
【德国图宾根大学-自动驾驶课程】目标检测——4基于区域的CNN
【哥伦比亚大学CV课程】001光流——3Lucas-Kanade方法
【哥伦比亚大学CV课程】008图像处理2——1傅里叶变换
【哥伦比亚大学CV课程】017图像缝合——3去除异常点算法RANSAC
【哥伦比亚大学CV课程】012未校正的立体视觉——3求解基础矩阵
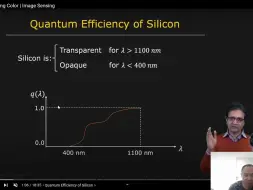
【哥伦比亚大学CV课程】005图像感知——4颜色感知:量子效率,人眼感光细胞,Bayer模式
【哥伦比亚大学CV课程】017图像缝合——4图像变形与融合
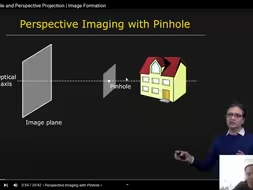
【哥伦比亚大学CV课程】004成像——1针孔模型与透视投影
13基于最小二乘的迭代重建算法:landweber,ART,SART,ISRA
【哥伦比亚大学CV课程】005图像感知——2图像传感器的结构:CCD和CMOS
【MIT的模型压缩与优化课程】16.3DiffusionModel——DDIM与蒸馏剪枝量化