V
主页
京东 11.11 红包
自动驾驶的历史
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【德国图宾根大学-自动驾驶课程】重建与运动——3光流
【德国图宾根大学-自动驾驶课程】里程计与SLAM——3VO:对极几何/非线性优化BA/直接法
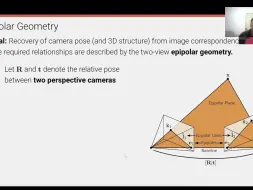
【德国图宾根大学-自动驾驶课程】重建与运动——1对极几何与图像矫正
【德国图宾根大学-自动驾驶课程】目标跟踪——2贝叶斯滤波
【德国图宾根大学-自动驾驶课程】目标检测——5_3D目标检测2
【德国图宾根大学-自动驾驶课程】重建与运动——2立体视觉匹配与深度图
【德国图宾根大学-自动驾驶课程】目标检测——5_3D目标检测1
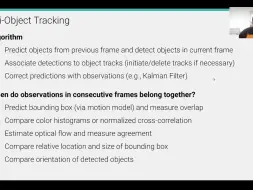
【德国图宾根大学-自动驾驶课程】目标跟踪——3数据关联
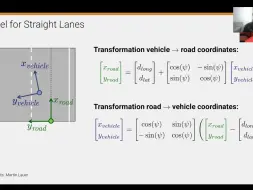
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——4车道检测
【德国图宾根大学-自动驾驶课程】目标检测——3滑动窗口与梯度方向直方图
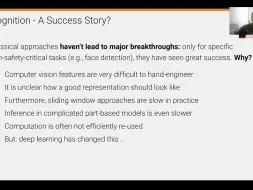
【德国图宾根大学-自动驾驶课程】目标检测——1介绍
【德国图宾根大学-自动驾驶课程】目标检测——4基于区域的CNN
自己开不如智己开?老款LS6更新IMOS3.2.0后首次使用记录#自己开不让智己开 #Momenta智驾大模型 #LS6
里程计与SLAM——5定位
【全874集】目前B站最全最细的ChatGPT零基础全套教程,2024最新版,包含所有干货!一天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
全体大会 | 2024世界智能网联汽车大会
里程计与SLAM——4BA与回环检测
【UnboxTherapy】特斯拉自动驾驶出租车初体验
【哥伦比亚大学CV课程】008图像处理2——1傅里叶变换
Tesla FSD 特斯拉自动驾驶V12.5 无手扶/三次接管/ 被撬车
100~200人的公司就想做L4的自动驾驶服务,太不知天高地厚了
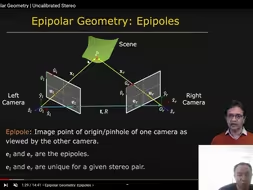
【哥伦比亚大学CV课程】012未校正的立体视觉——5计算深度
【哥伦比亚大学CV课程】001光流——1光流与运动场
【MIT的模型压缩与优化课程】3.0剪枝与稀疏性——剪枝粒度与剪枝准则
【哥伦比亚大学CV课程】016图像分割——2KMeans算法和MeanShift算法
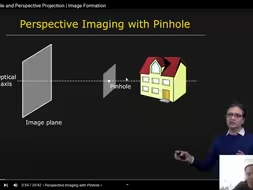
【哥伦比亚大学CV课程】004成像——1针孔模型与透视投影
【哥伦比亚大学CV课程】013边检测——2拉普拉斯算子检测边_高斯平滑
Yolov8跟踪结果
【哥伦比亚大学CV课程】012未校正的立体视觉——2对极几何约束
道路分割与车道检测——1介绍与挑战
特斯拉机器人在向大家展示自己的力量
失业还算不上最惨的?2024悲惨程度排行榜,看看你是几颗星。
特斯拉自动驾驶FSD Supervised v12.5.6 无保护左转横穿快速路
【4K双语字幕】特斯拉 Tesla We,Robot 发布会 | Robotaxi Robovan Optimus
自动驾驶 正在产生幻觉?
无码的哟!【Stable Diffusion】2024最强换脸教程!真的太变态了!一键换脸小白轻松实现还原人像艺术,不要太爽!!!
【AI】特斯拉:无人驾驶的时代来了
特斯拉和萝卜快跑,到底谁才是遥遥领先?
【哥伦比亚大学CV课程】001光流——3Lucas-Kanade方法
【哥伦比亚大学CV课程】014边缘检测——1直线拟合和曲线拟合