V
主页
双目深度估计实战(上篇)
发布人
本视频来自「3D视觉工坊」精品课程:相机模型与标定系统课程(单目+双目+鱼眼+深度相机):https://ebzbf.xet.tech/s/3E00RW 小助理微信: cv3d007
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定的基本原理与经验分享
传统深度估计方法实战
深度相机概述
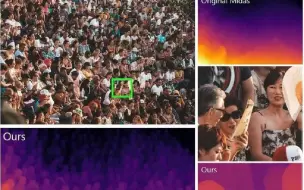
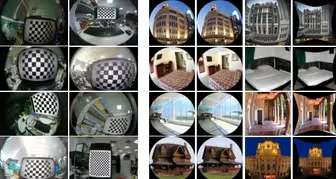
Depth Anything!最强开源单目深度估计SOTA!
单目深度估计|连续帧方法实战课
大模型时代下的端到端自动驾驶(上篇)
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
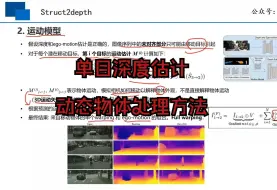
单目深度估|动态物体处理方法
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
这绝对是质量最高的单目深度估计开源方案!
如何进行三维重建?从单帧深度估计到完整模型重建
[ICCV2021] DSEC:用于驾驶场景的双目事件相机数据集
点云3D深度学习模型与实践
从零搭建一套结构光3D重建系统 [理论+源码+实践]
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
光学3D测量技术原理及应用
无人机-PID算法详解与实战
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
CVPR2019论文:基于神经网络深度估计原理的单目RGB-D深度相机
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
自动驾驶中的深度学习模型部署实战-CUDA编程优化、profile使用
四旋翼无人机-PX4控制算法原理
五分钟开发一款自己的点云处理软件(python)
单目无监督深度估计综述
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
三维点云系列视频——第一章绪论
自动驾驶中常用传感器硬件介绍
爆火!DepthSplat:连接3DGS和深度估计!
自动驾驶中实战课之Lidar与IMU的同步实战
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
自动驾驶中的视觉感知技术
极快跟踪一切!DOT:无惧遮挡!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
UCL开源 | Spann3R:基于空间记忆,不估计相机参数也能实时重建(上篇)
如何高效学习单目深度估计?