V
主页
京东 11.11 红包
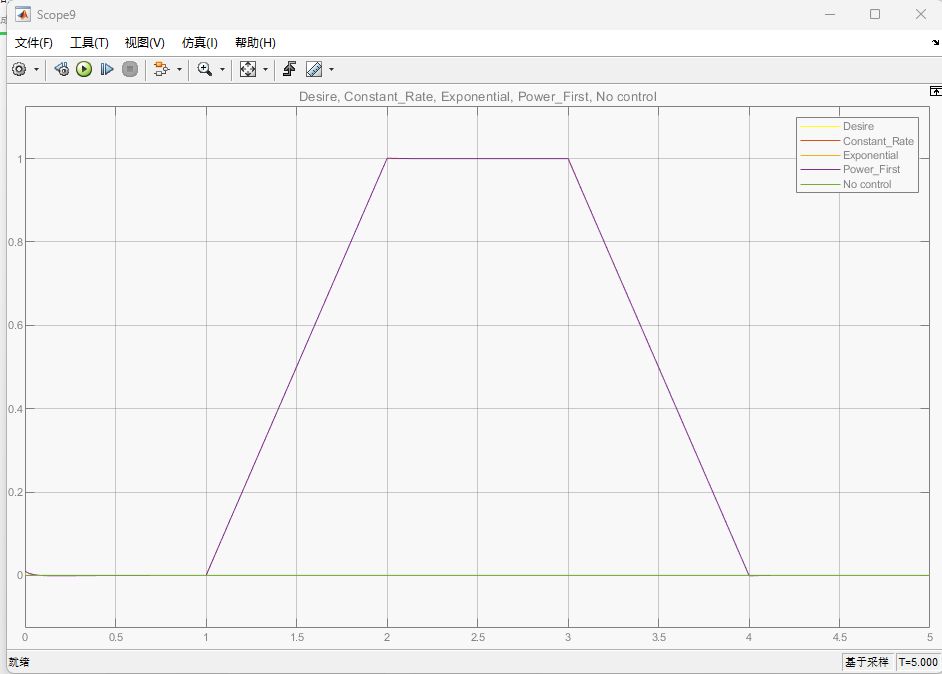
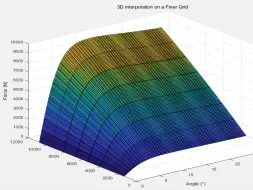
滑模控制的一阶模型实例
发布人
模型及文件可从主页工房获取 在模型中,切换项使用了饱和函数sat(s)代替了普通的符号函数sign(s) 由于Simulink自身的特性,使用sign(s)会有一些bug 本视频重点介绍实践应用,理论部分较为复杂,因此UP主仅根据自己的理解为大家提供初步的介绍。如果有疑问或需要深入理解,建议观众自行查阅资料,从多个角度进行验证,最终形成个人的方法论。
打开封面
下载高清视频
观看高清视频
视频下载器
滑模控制原理的简单介绍
滑模控制的二阶模型实例(使用Simulink/Level-2 S-Function实现)
滑模控制的三阶模型实例
滑模控制稳定性的理论证明
滑模控制的常规二阶模型实例
基于线性二自由度模型的车辆多速度多输入动态响应仿真:结合Matlab和Simulink的多种建模与结果展示策略
基于Carsim和Simulink联合仿真的线控转向系统理想角传动比设计
多智能体系统,编队控制,避障,参考校正算法,滑模控制文献+MATLAB 复现代码
四旋翼无人机轨迹跟踪预定义时间事件触发滑模控制(文献+simulink仿真)
线控制动系统制动力分配策略模型使用速通版
基于Carsim和Simulink联仿的线控制动系统弯道制动力分配策略
线控转向路感模拟第五章 (路感模拟执行层)
基于Carsim和Simulink联仿的线控转向系统前轮转角控制策略研究
非线性三自由度模型的简单原理、应用及与Carsim模型的响应仿真对比
基于Carsim和Simulink联仿的线控制动系统直道制动力分配策略
非线性二自由度模型的原理、应用及与Carsim模型和线性二自由度模型的响应仿真对比
线性二自由度模型与Carsim的响应仿真对比(基于Carsim和Simulink联合仿真)
魔术公式的简单原理、应用与参数拟合方法探讨(基于Carsim自带的轮胎数据,包含轮胎侧偏刚度计算)
BMS高压上电预充策略讲解
线控转向模型的使用及问题
【matlab&simulink手把手教学5.5】控制部分之计数器模块(simulink篇)
第三讲:Simulink系统建模
MATLAB R2024a完全自学一本通,0基础入门,从入门到精通,自学教程,Simulink,数学建模,系统仿真,中科院专家编著,新手入门
【173.041】多智能体系统仿射编队机动控制
第一讲:Simulink基础
【271】基于学习的随机MPC自动驾驶故障检测与数据驱动的最优自适应容错控制
【272】【需要 MOSEK 求解器】非线性系统的组合迭代学习与模型预测控制方案
【283】不确定性下安全临界多智能体系统连续控制的二次规划
实践3-1 状态观测器
【274】多智能体系统 (Multi-Agent Systems, MASs)
(最新水论文方法加入多目标鲸鱼寻优和帕累托前沿解)六种最新智算法优化BP神经网络(豪冠猪(CPOBP)、蜻蜓(DABP)、矮猫鼬、阿里巴巴、人工大猩猩、合作)
【matlab&simulink手把手教学5.13】控制部分之自己实现锁相环(PLL)模块(simulink篇)
【046】MPC模型预测控制基础
【266】DoS攻击下一类非线性系统的事件触发H无穷滤波
【matlab&simulink手把手教学5.12】控制部分之锁相环(PLL)模块(simulink篇)
线控转向模型的补充(重要!!!)
实践3-2 在Simulink中搭建标准型系统的状态观测器
【270】动态不确定自主无人舰艇编队的自适应动态面控制
Matlab安装包下载免费版,Matlab安装教程,Matlab免费安装方法
【matlab&simulink手把手教学1.4】示波器-scope