V
主页
京东 11.11 红包
玩个普农红温了,只能拿起连喷去给农场城市化了
发布人
为什么我玩DP12就会死呢?
打开封面
下载高清视频
观看高清视频
视频下载器
【PX4开源无人机】UAVCAN | Pavel Kirienko | PX4线上开发者峰会2020
【ArduPilot开源飞控】EFK更新 | EFK2/EKF3作者Paul Riseborough讲解 | 2020年ArduPilot线上开发者大会
【无人机】MAVLink3进度更新 | 暂时不会有MAVLink3了 | 由Lorenz Meier讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【PX4开源无人机】软件在环仿真(SITL)的配置和开发流程 | Jaeyoung Lim | PX4线上开发者峰会2020
【ArduPilot开源飞控】OpenTX Lua数传与FrSky回传库| @yaapu Alex Apostoli | 2020年ArduPilot开发者大会
【ArduPilot开源飞控】Ocius自主无人船 | 由Ocius软件工程师Matt McGill讲解 | 2020年ArduPilot线上开发者大会
【无人机】PX4视觉和Offboard控制接口 | 由Auterion计算机视觉工程师Martina Rivizzigno讲解 | PX4开发者峰会2019
【无人机】使用MAVSDK通过MAVLink控制无人机 | 由MAVSDK维护者Jonas Vautherin讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【开源飞控】Pixhawk:无人机上的社区驱动的开源标准 | 创始人Lorenz Meier与核心开发者们 | PX4线上开发者峰会2020·直播录像
【无人机】Dshot MultiShot OneShot PWM是什么以及优缺点 | 电调通讯协议解读 - PART 1 | Joshua Bardwell
【PX4开源无人机】纯硬件仿真(SIH)低成本硬实时的HITL | Romain Chiappinelli | PX4线上开发者峰会2020
Lorenz Meier 主讲 PX4 2019 年发展路线图
【无人机】计算机视觉前瞻 | 研讨会 | 由Julian Kent与Lorenz Meier主持 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【RTOS实时操作系统】PX4-基于NuttX操控无人机飞行 | 由PX4底层系统维护者David Sidrane讲解 | 2019年NuttX国际工作坊
【ArduPilot开源飞控】直升机更新 | 由直升机维护者Bill Geyer讲解 | 2020年ArduPilot线上开发者大会
【无人机】PX4飞控的过去现在和未来 | 由PX4创始人Lorenz Meier博士讲解 | PX4开发者峰会@ETH苏黎世联邦理工大学
【ArduPilot开源飞控】系统更新 | 由核心开发者Andrew Tridgell讲解 | 2020年ArduPilot线上开发者大会
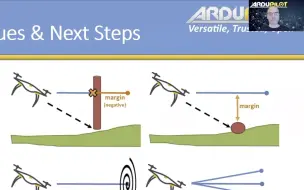
【ArduPilot开源飞控】物体躲避更新 | 核心开发者Randy Mackay讲解 | 2020年ArduPilot线上开发者大会
【无人机】VTOL垂起无人机控制与空速错误检测 | 由Roman Bapst讲解 | PX4开发者峰会2019
【PX4开源飞控】这是无人机?飞机?不,是Jetman!| Flybotix研发工程师Julien Lecoeur | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】深入了解多轴无人机控制系统架构 | Anton Erasmus | PX4线上无人机开发者峰会2020
用MP和最新的ArduPilot固件为Pixhawk等兼容飞控升级ChibiOS Bootloader 由ArduCopter作者Randy演示
【研讨会】PX4开源无人机介绍与入门 | SITL仿真与MAVSDK演示 | Arm Innovation Coffee
【无人机】PX4飞行任务架构 | 由Dennis Mannhart与Matthias Grob讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】现代无人机系统的高能效电力推进 | 由Zubax的Alexander Sysoev和Pavel Kirienko主讲 | PX4开发者峰会2019
【ArduPilot开源飞控】Lua脚本 | 由Michael duBreuil讲解 | 2020年ArduPilot线上开发者大会
【ArduPilot开源飞控】集群与灯光秀 | 由ArduBee项目研发总监Giorgio Rinolfi讲解 | 2020年ArduPilot线上开发者大会
【PX4开源飞控无人机】MAVSDK与软件在环仿真(SITL)入门教学 | AmadorUAVs | 官方教程系列
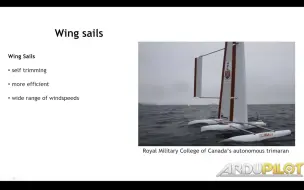
【ArduPilot开源飞控】帆船 | 由Peter Hall讲解 | 2020年ArduPilot线上开发者大会
【PX4开源飞控无人机】为MAVSDK扩展新特性 | MAVSDK维护者Jonas Vautherin | PX4线上开发者峰会2020·直播录像
【开源飞控无人机】使用NXP UAVCAN开发板入门UAVCAN v1 | Peter Van Der Perk | PX4线上开发者峰会2020·直播录像
【PX4开源飞控无人机】MAVROS Python使用教程(一):安装与基本设置 | Farhang Naderi
【PX4开源飞控无人机】事件驱动的自主飞行之路(三个思路) | Ram Grandhi & Deepak Singh | PX4线上开发者峰会2020·直播录像
【ArduPilot开源飞控】未来规划 | ArduPilot团队讨论 | 2020年ArduPilot线上开发者大会
【PX4开源无人机】SmartWings: 飞行器的主动湍流抑制 | Andras Galffy | PX4线上开发者峰会2020
【无人机】PX4在STEM教育的应用 | 这个团队结合树莓派做了很多有疯狂的项目 | 由俄国团队COEX演讲 | PX4开发者峰会
【无人机】PX4软件在环仿真(SITL)改进与ROS集成 | 由ROS平台经理Tully Foote讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【PX4开源无人机】PX4的网络空间安全(Cybersecurity)现状 | Victor Mayoral Vilches | PX4线上开发者峰会2020
【无人机】像实飞一样测试:为libuavcan实现实机测试 | 由Scott Dixon讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【PX4开源无人机】高中生团队分享自主无人机竞赛经验 | AmadorUAVs | PX4线上开发者峰会2020